Senior Telemaster Plus by Hobby Express
Review:
How it came about
 This page is about my Senior Telemaster Plus (which I will
shortly call SrTM+ below). For years I'm quite nuts on the Telemaster.
In 2007 I built "virtual" Senior and Giant models for the
REFLEX XTR² model flight simulator (see
Downloads).
Especially the Senior Telemaster
is one of those classics which were once popular all around the world
and which I revived virtually to experience the look and feel I had
not in my youth. The Telemaster turned out especially interesting for
me. So I wrote not only the usual document about the simulator models
but also researched the model's history. The history chapter is now
the better part of the whole 50+ page article, which you may read
and/or download
here
(PDF 3.2 MB).
This page is about my Senior Telemaster Plus (which I will
shortly call SrTM+ below). For years I'm quite nuts on the Telemaster.
In 2007 I built "virtual" Senior and Giant models for the
REFLEX XTR² model flight simulator (see
Downloads).
Especially the Senior Telemaster
is one of those classics which were once popular all around the world
and which I revived virtually to experience the look and feel I had
not in my youth. The Telemaster turned out especially interesting for
me. So I wrote not only the usual document about the simulator models
but also researched the model's history. The history chapter is now
the better part of the whole 50+ page article, which you may read
and/or download
here
(PDF 3.2 MB).
Probably, the original model had been designed in 1968 in Germany and exported to the USA from 1973 on. In 1975, Jim Martin, founder and owner of Hobby Lobby International, acquired the rights on the model and had Joe Bridi redesign and produce it. There was a balsa shortage and they had to make do with less and lower-quality balsa. From then on, there was always some grumbling about the redesigned version. It wasn't just the lightweight but sturdy load-carrier the original version had been, the ailerons were less effective. Later, people wanted flaps and an electric drive, and they wished the big 8 ft one-piece wing were dismountable and the 2.75 ft horizontal stabilizer were removable.
 In 2003, Jim Martin retired after 40 years, and a few years later (2009) Hobby
Lobby International got another new owner who later renamed it Hobby Express.
(At least that is what I know, see here.) All Telemaster variants had been bestsellers and
of course they wanted to keep it that way. So the new owner had them all modernized
to meet the modern customer needs. In that course they even brought out a new,
special Senior Telemaster Version, the Plus. I think in 2011 it was the
first of the "V2" (version 2) line of Telemaster models and it's an
ARF, not a kit.
In 2003, Jim Martin retired after 40 years, and a few years later (2009) Hobby
Lobby International got another new owner who later renamed it Hobby Express.
(At least that is what I know, see here.) All Telemaster variants had been bestsellers and
of course they wanted to keep it that way. So the new owner had them all modernized
to meet the modern customer needs. In that course they even brought out a new,
special Senior Telemaster Version, the Plus. I think in 2011 it was the
first of the "V2" (version 2) line of Telemaster models and it's an
ARF, not a kit.
You could have a look at the Senior Telemaster Plus web page by Hobby Express. As of late 2017 it's gone but it's preserved in the Web Archive. Especially this Telemaster version has been discontinued, but the whole Hobby Express business has been sold and all other Telemaster versions have been modernized again (see their new home page).
The Senior Telemaster was originally the biggest variant with 2.40 m (94") wingspan and was meant as a load carrier. So they gave the new version a wider fuselage and an optional "Drop Box" to drop candies or such things. They reverted to "the good old barn door ailerons" and added big flaps for real STOL capability (Short Take-Off and Landing). At the same time they made the model easier to transport. They replaced the one-piece wing by two plug-in halves with lift struts and also made two plug-in halves from the formerly fixed horizontal stabilizer.
 Instead of an aluminum-plate landing gear, the Plus got an old-style
landing gear made from 4 mm steel wire. It has two struts on each side
what gives it a long base under the fuselage (where formers are) and makes
it rigid in longitudinal direction. A third strut (3 mm diameter wire)
goes to a spring in the middle of the fuselage bottom, forming a bungee
suspension.
Instead of an aluminum-plate landing gear, the Plus got an old-style
landing gear made from 4 mm steel wire. It has two struts on each side
what gives it a long base under the fuselage (where formers are) and makes
it rigid in longitudinal direction. A third strut (3 mm diameter wire)
goes to a spring in the middle of the fuselage bottom, forming a bungee
suspension.
Probably, the engine bay should accommodate an electric motor as well as four-stroke glow or gas engines, which are much bigger. So they provided a wooden mount for rear-side installation of an adequate outrunner with the usual hole pattern. Now the first former (firewall) has to be slanting to give the necessary right and down thrust, and the mount has to be fixed off-center on the firewall so the propeller axis is in the model's centerline.
Thrust offset is substantial, I measured 2.5° right and 4° down. Correspondingly, the wing's incidence is +3° and the stab's is +2°. Since both have true flat-bottom airfoils, this is measured from their bottom and means the geometric incidence angles are actually +4° and +2.5°, measured from the chord lines. Due to the big negative zero-lift angles-of-attack (AoA) of such airfoils, the aerodynamic incidences are even +6.5° and +4°, respectively. That makes for only 1.5° geometric and 2.5° aerodynamic decalage, which matches the quite rear C/G position (see below). Together with the big downthrust, that gives a pleasant "neutral" flight behavior, meaning the airplane has a wide speed range in level flight without raising or lowering its nose.
 They recommended motors with a quite low kv value (380 rpm/V)
which can spin big 17" propellers. The model is not fast but weighs about
10 lbs so it needs some thrust. The ground clearance is big enough
to accommodate even 20" propellers which might be even more efficient
or effective, respectively.
They recommended motors with a quite low kv value (380 rpm/V)
which can spin big 17" propellers. The model is not fast but weighs about
10 lbs so it needs some thrust. The ground clearance is big enough
to accommodate even 20" propellers which might be even more efficient
or effective, respectively.
Finally, the model's whole internal structure is new and modern. It's all laser-cut parts, mostly light plywood and as little expensive balsa as possible. (There's still quite a bit, though.) The fuselage is made from left/right and top/bottom frames and some formers as well as longerons. The wings and now even the horizontal stab have a sheeted D-tube for good torsional rigidity and only as many ribs as absolutely needed.
That all looked really good to me, I was hooked. I always wanted to have a Senior Telemaster but for some reasons I'm not able to build one from plans. I didn't want the 1975 redesign kit, either, so a modernized version as an ARF (with a nice paint scheme, by the way) for a very reasonable price – that's it. It was just worth a try. Let's look in detail what I got.
The Purchase
 In January 2012, Hobby Lobby kindly answered my question if I could order
in their Web shop: Yes, but only with shipping via UPS Worldwide Expedited.
The model with Drop Box cost $370 and the shipping $218 but hey, that wasn't
too bad since it included customs duty ($22) and import sales tax ($90), so
the price in Germany was actually $482 and shipping to Germany – even
including customs clearing – was actually $105. And in a couple of
days UPS gracefully delivered the well-packed box right to my doorstep
in Germany, even at a convenient time when I was at home.
In January 2012, Hobby Lobby kindly answered my question if I could order
in their Web shop: Yes, but only with shipping via UPS Worldwide Expedited.
The model with Drop Box cost $370 and the shipping $218 but hey, that wasn't
too bad since it included customs duty ($22) and import sales tax ($90), so
the price in Germany was actually $482 and shipping to Germany – even
including customs clearing – was actually $105. And in a couple of
days UPS gracefully delivered the well-packed box right to my doorstep
in Germany, even at a convenient time when I was at home.
Just to put the expenses into perspective: Add up the model's price and the shipping cost – I paid about twice that amount for equipment. Spinner nut, propeller, motor, gold-plated plugs, ESC with S-BEC and telemetry, AntiFlash, Safety Switch, battery, temperature sensor, FlightRecorder, GPS, receiver, PeakFilter, six servos, twelve extension leads, not to mention better replacement hardware (control horns, ball links, clevises, wheels) – you'll find all this equipment described below.
Add to that a new motor mount (as repair of a damage), a new ESC (as replacement for a defective one), a new tail landing gear (as retrofit for the problematic stock gear), two new elevator servos (as retrofit for a busted one and upgrade), a flight stabilizer and two more telemetry sensors (as upgrade just for fun), a receiver battery (as upgrade for more safety), a voltage regulator (for the new telemetry sensors), and even two new drive batteries (as replacement for defective ones) – you'll see that this ARF model (airframe) is in fact cheap, at least for its size and features.
I had a bit of a problem when I saw that MADE IN CHINA on the box. It was not about quality, it seemed just crazy to bring this big model to the USA and then to Germany, more than half around the world. But that was the only way to get hold of this model here.
Inside the corrugated shipping box was the actual box with some box art on it. Seems Hobby Lobby opened both boxes to put the Drop Box in them, what I had asked for. (Thank you!) The outside box shows some minor damage but the inside box was in pristine condition.
 They are warning Oversize! and this is what they mean: A 16x13x65" box
with a net weight of 9 lbs and a gross weight of 16½ lbs.
The symbols say the box has to be kept upright and dry and handled with care,
and obviously they did – well, sort of.
They are warning Oversize! and this is what they mean: A 16x13x65" box
with a net weight of 9 lbs and a gross weight of 16½ lbs.
The symbols say the box has to be kept upright and dry and handled with care,
and obviously they did – well, sort of.
 That was the whole content. It was nicely packed but the box can't
be used for the completed model because it is quite cramped (despite
oversize) and the servos and control linkages of the completed model
protrude. So I disposed of both boxes.
That was the whole content. It was nicely packed but the box can't
be used for the completed model because it is quite cramped (despite
oversize) and the servos and control linkages of the completed model
protrude. So I disposed of both boxes.
I replaced the wheels immediately, these are Graupner wheels. The small bag on the left side contains the tail wheel assembly, screws, hinges, control horns, pushrods, and the elevator joiner. I should have replaced most of this as well, but that was not as obvious as for the wheels. Below are the dark red (anodized) wing struts, the wing joiner tube and shear tube, and the horizontal stab's joiner tube and shear tube, all made from aluminum. No parts were missing, all was there.
The fuselage front hatch was distorted, but a plate of thin plywood glued underneath straightened that out. There were several wrinkles in the covering, which I ironed out. When the model was finished, wing and stab were not parallel. Hobby Express had a (now removed) video on YouTube showing how to fix that by untwisting the fuselage by hand while applying a covering iron. I succeeded using this method.
Unfortunately, both the wrinkles and the twist tend to reappear. While fewer and fewer wrinkles appear, the twist seems to be built in, maybe a misalignment of wing and stab joiner tubes due to not quite accurate interlocking construction without a jig for the tubes. The covering can hold out against the tension only for some time and relaxes again. At least that's what I suspect. It's no big deal, though.
Wings and stab have to be tentatively mounted to drill holes in the aluminum tubes for the securing screws. I started with that and then glued in the fin. Now hinges have to be glued into ailerons, elevators, and rudder; the flaps have screw-on hinges. The controls are mounted to their respective counterpart (wing, stab, fin) and together with the rudder, the tailwheel assembly is installed.
The standard-size servos get the required extension leads plugged or soldered in and suitable arms screwed on. They are screwed onto the pre-cutout and pre-drilled trays, and the included linkages are installed or better replacement parts (what I did later). Finally the drive components are simply screwed or velcroed on, as are the R/C components.
On the Senior Telemaster Plus web page by Hobby Express, all parts of the model are listed with pictures in the "Parts and Accessories" section (click on the tab). In the "Support" section the covering is specified (as Ultracote, though the "Description" section says Oracover, but should be the same) and the two instruction manuals are offered for download as PDFs. Of course both manuals were as well included in the box as (monochrome) printouts.
The links to the manuals for the model and the Drop Box point to the Web Archive now. I strongly recommend looking at them because they are quite informative. There are several color photos showing the hardware in detail, especially the hinges, control horns, and pushrods. Another good, if not even better source of information including pictures is the 2011 review at RC Groups. Hobby Express had even a (now removed) video on YouTube about the Drop Box and its operation. Of course, all looks like being perfect in manuals, but I'll soon show you that (my) reality is not too bad, either.
The Hardware
 The sun shining through the covering reveals some of the model's internal
structure (as well as in most of the pictures above and below). The wings
have a D-tube front from the main spar to the leading edge. The ribs are
spaced quite widely and still need no cap strips. The spacing is even wider
in the outer wing parts. Flaps and ailerons are built up with the same rib
spacing without diagonal stiffeners. Since the control horns are close to
the flaps' and ailerons' center, this seems to work, though. Only some
balsa blocks for the hinges and control horns are glued in.
The sun shining through the covering reveals some of the model's internal
structure (as well as in most of the pictures above and below). The wings
have a D-tube front from the main spar to the leading edge. The ribs are
spaced quite widely and still need no cap strips. The spacing is even wider
in the outer wing parts. Flaps and ailerons are built up with the same rib
spacing without diagonal stiffeners. Since the control horns are close to
the flaps' and ailerons' center, this seems to work, though. Only some
balsa blocks for the hinges and control horns are glued in.
The flaps don't reach right to the fuselage sides but only to the second inner rib. The wing's inner part is all sheeted for stability, perhaps to have a long base that prevents the wings from tilting over backwards. I don't think the whole chord length needs to be sheeted, though. The flaps could well begin at the fuselage sides without losing strength in the wing root. I don't see aerodynamic reasons for the flaps beginning outboards, either. In fact I think they would be even more effective reaching right to the fuselage sides. Was the designer afraid of stalls when the airplane is sideslipped with flaps down, or of unrulable turbulences? Or might the root piece be meant as a reference for adjusting the flaps' (and ailerons') neutral position? Would not really be needed (and isn't correct anyway)...
Quite a bit outboards, the lift strut is attached to the main spar with an Allen screw. More inboards is another Allen screw securing the aluminum wing joiner tube running along the main spar. Near the rear spar is a third, smaller Allen screw securing the aluminum shear tube. Since the tubes are secured in both wings no screws are needed in the fuselage.
Both tubes sit near formers in the fuselage, the bigger joiner tube just in front of an especially strong former which also holds the inner ends of the lift struts. These are secured by the four Allen screws which hold the two straps over the rear landing gear strut. The aluminum tubes, the steel struts, and the Allen screws of course make for some weight. It would probably be hard or costly, respectively, to save some weight here since that would require carbon fiber tubes and struts.
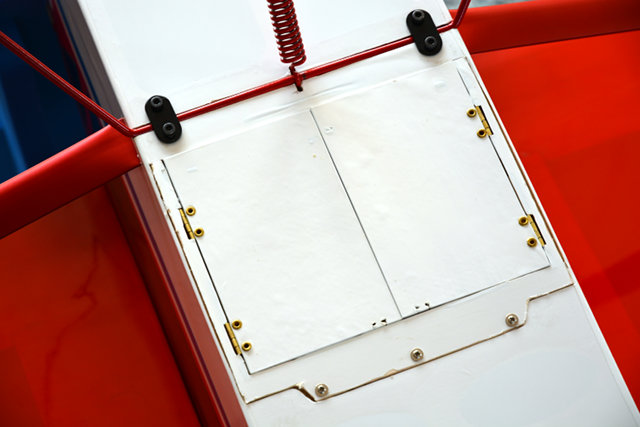 Between the said two formers is a hatch covering the fuselage bottom
opening. At the fuselage "ceiling" over this opening sits the
receiver, the model's "nerve center".
Between the said two formers is a hatch covering the fuselage bottom
opening. At the fuselage "ceiling" over this opening sits the
receiver, the model's "nerve center".
If the optional Drop Box is used, it is inserted between the two formers through the opening, in place of the hatch, and secured with the same three small screws (clever solution). Both the hatch and the Drop Box don't fit exactly in the fuselage's surface. I think the outlines of the wooden parts are cut correctly but there's no gap left for the covering around the edges.
By all means, while the simple hatch can be just screwed on, the Drop Box must fit exactly in the recess or the screws are too short. Quite a bit had to be milled off (with a Dremel tool) from three sides (left, right, rear) until the plate meshed.
 The wheels included in the ARF are not too bad but with their narrower
hard-foam tires and grey rims they looked at least a bit flimsy and dull
on the stout model with its bright paint scheme and even red-painted
landing gear. (The enamel color is called Ferrari red by Revell.)
So the 105x30mm (4.1x1.2") light foam wheels were immediately
replaced by 120x45mm (4.7x1.8"), as well light, inflated wheels with
silver rims by Graupner. The axles are just long enough to accommodate
them with even two collars each. Two pieces of brass tube are used as
sleeves between the 4mm diameter axles and the 5mm wheel bushings.
The wheels included in the ARF are not too bad but with their narrower
hard-foam tires and grey rims they looked at least a bit flimsy and dull
on the stout model with its bright paint scheme and even red-painted
landing gear. (The enamel color is called Ferrari red by Revell.)
So the 105x30mm (4.1x1.2") light foam wheels were immediately
replaced by 120x45mm (4.7x1.8"), as well light, inflated wheels with
silver rims by Graupner. The axles are just long enough to accommodate
them with even two collars each. Two pieces of brass tube are used as
sleeves between the 4mm diameter axles and the 5mm wheel bushings.
The forward landing gear strut is attached to a forward former with another two straps and four Allen screws. The third "strut" is a bit thinner (3mm, the main struts are 4mm) and is actually a bungee, together with the spring hung under the rear strut. This landing gear configuration is really nice and certainly lighter than one made of an aluminum plate, but it isn't the lightest possible solution either. Again, it would probably be costly to replace it by a carbon gear to save some weight.
 This picture shows a whole wing, which is fully sheeted at root and tip
(between the two inner and outer ribs, respectively). Whereas I agree
to sheeting the innermost rib bay, I have no clue why they sheeted the
outermost as well, which is quite big. Couldn't they save a bit weight
here, especially that far outboard where it increases the roll and yaw
inertia? Or is it made to have a tight grip on the wing when it is
mounted and demounted?
This picture shows a whole wing, which is fully sheeted at root and tip
(between the two inner and outer ribs, respectively). Whereas I agree
to sheeting the innermost rib bay, I have no clue why they sheeted the
outermost as well, which is quite big. Couldn't they save a bit weight
here, especially that far outboard where it increases the roll and yaw
inertia? Or is it made to have a tight grip on the wing when it is
mounted and demounted?
The wingtips are "simply" beveled giving kind of aerodynamically advantageous Hoerner wingtips. Between root and tip are only eight open (not sheeted but covered) rib bays, three in the outer (aileron) part and five in the inner (flaps) part. The rib spacing increases from root to tip – good idea. There's one additional (half?) rib for the aileron and the flap servo tray, each (see next picture).
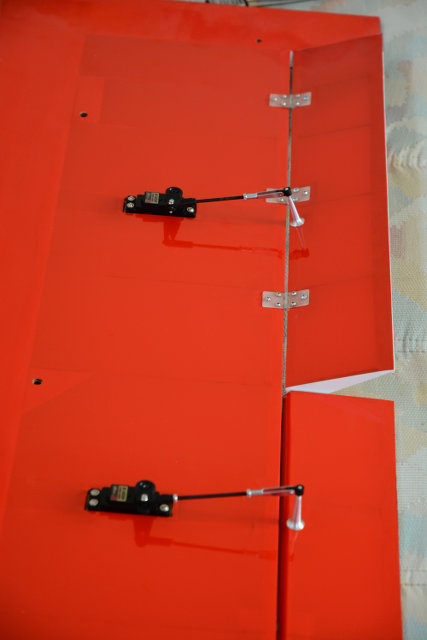
The cutouts and the pre-drilled holes are for "standard size" servos (as are those for the two tail servos). Hobby Lobby recommended the budget Hitec HS-322, but I wanted digital because I thought that would be kind of future-proof, and I needed high-voltage because the Multiplex GPS device connected to the receiver needs at least 6V (see below). So I chose in fact Hitec but the as well budget-priced HS-5495BH servos with one ball bearing and Karbonite gear.
The budget price is well appreciated, 89 oz·in (63 Ncm) torque and 0.17 s speed (45°) at 6V are well sufficient. But about 50g (1.75oz) gross weight per servo plus the weight of the long and heavy extensions make for about one pound for all six servos in the model, and the control horns and linkages are not exactly lightweight, either. Even if at some cost, some weight-saving is possible here. And servos near the model's center as well as pull-pull linkages would noticeably reduce moments of inertia and give a better linkage geometry. This holds for the tail servos as well (see below).
 This again clearly shows the wing structure; the ribs, the sheeting,
the joiner tube with its securing screw on the main spar, as well as
the lift strut attached to the main spar.
This again clearly shows the wing structure; the ribs, the sheeting,
the joiner tube with its securing screw on the main spar, as well as
the lift strut attached to the main spar.
Both ailerons and flaps have a hinge spar and a trailing edge spar and ribs were the wing ribs are. The hinges are mounted in balsa blocks in corners of ribs and hinge spar. There are three (pin-shaped) pin hinges for each aileron, whose hinge spars are beveled for up and down deflection. And there are three (flat) pin hinges screwed under each wing and flap, which have non-beveled (flat) hinge spars because they deflect only down. For a closer look at the hinges and how they are mounted see the manual.
The pre-drilled holes for the pin-shaped hinges had to be drilled out further and cleaned; the screws of the flat hinges needed a bit pre-drilling. The tricky part was getting the hinge pins of a flap or aileron all in line with each other and with the ridge of its front (hinge) bar. That way the control can move freely and there's nearly no gap. The flap hinges are screwed on while the aileron hinges are glued in (so it is not possible to dismount them unless you replace them by dismountable pin-shaped hinges).
The control horns are basically threaded bolts screwed on the controls with one aluminum collar on each side. On the protruding part of the bolt is a black plastic lug with a hole for the clevis pin. That is a good solution since it's essentially a U-joint and the linkage with the clevis can turn around both the bolt/horn axis and the clevis pin axis. This is necessary for the whole arrangement and should be clear when you imagine how the servo arm, pushrod, and control horn move.
On the servo arm, the pushrod can actually only swivel around the clevis pin axis. It needs to tilt a bit around the servo arm as well when the control horn moves up and down, but that is possible only by tilting the clevis on the servo arm. To this end, the gap in the clevis is wider than actually needed. Of course, the clevis pin is tilted in the servo arm hole. Even worse, the pins are Phillips screws with a lock nut, what is good, but the screw shaft is all threaded. So we can expect the servo arm holes to be worn out soon by the tilting and rubbing screws.
There are two more problems: The gaps in the clevises are "too short" so the clevises can't swivel far enough around the servo arms before striking against them. That way servo travel is limited mechanically and has to be limited in the transmitter setup as well. Next, the control horns are too short, or at least shorter than would be convenient. For the small aileron deflection, the clevis pin has to be put into the second hole (of four) of the servo arm. The flap servo can travel only forward because the pushrod is too long (it would be just right for a knee-lever setup), but not even the full 45° because the clevis jams the servo arm.
This all makes for unprecise, wearing, loose, hence inappropriate and outright bad linkages (not hardware), which work only by means of the good torque and resolution of the digital servos. The required remedy would be (appropriate) longer control horns, ball links instead of clevises at least on the servo arms, if clevises at all then such with smooth (not threaded) pins, and maybe shorter or, even better, longer flap pushrods (see below why).
 Like the wings, the stab halves are fully sheeted at root and tip
(between the two innermost and outermost ribs, respectively). There
are only three open rib bays per half. Again I have no clue why
they sheeted the outermost rib bays instead of saving a bit weight
on the tail, except for a better grip.
Like the wings, the stab halves are fully sheeted at root and tip
(between the two innermost and outermost ribs, respectively). There
are only three open rib bays per half. Again I have no clue why
they sheeted the outermost rib bays instead of saving a bit weight
on the tail, except for a better grip.
The elevators have hinge spar, trailing edge spar, and ribs, and are covered. There are pieces of steel wire in each half, which are clamped together with a screw-on joiner (see manual).
The stab halves are put on a joiner tube and a shear tube, both aluminum. One small securing Allen screw on each side is sufficient. By the way, that makes for a total of 16 securing screws: 4 in the wing tubes, 2 for the lift struts, 8 for the landing gear, and 2 for the stab. (Of course, all blind nuts are already in the ARF parts.) A stand, like the blue one in one of the pictures above, is needed to rig the model bottom side up. I left the stab mounted because else I had to dismantle the linkage and the elevator joiner, which are both quite delicate, especially the joiner. Actually, this is not what it was meant for...
A perfect and quite feasible solution would be no joiner but one micro servo with linkage on each stab half instead. There would be additional weight from the second linkage, but no joiner and no connector wires. And two micro servos weigh even less than the single standard-size servo used now. One micro servo per elevator half would give well enough torque (see below). Using only one red (+) and one brown/black (-, ground) core for all three tail servos, and an own yellow/orange (signal) core for each in a combined extension lead, would further reduce tail weight at least a bit. Now an auto-plug for the stab servo leads would be consequential. That would be simple, just a three-pole (Multiplex servo) plug glued into each stab half and a matching socket in each fuselage side. When rigging up, the stab halfs would just have to be put on their joiner tube and shear tube, then pushed to the fuselage, finally secured with the two Allen screws – easy.
Oh well, I should have come up with this solution in the first place and not only later, when I had to replace the busted elevator servo (see below). Even without the auto-plug, this solution is so much better than the stock one that it is worth the additional costs, at least for me.
 This picture shows the tailwheel assembly mounted correctly to the tail
(or so I thought). You should look into the
manual to see how it's done. There were some
complaints in the reviews on the
Senior Telemaster Plus web page, but I had
actually no problem. I added a Nylon washer under the mounting plate
because the tailwheel's load has to be borne by that plate and the wheel
should still be easily swiveling. There must be no slack, either, because
else the load would be borne by the rudder and its hinges. The bending
forces are borne by the rudder, anyway. Oh well, it's a tricky design,
I wish it were different.
This picture shows the tailwheel assembly mounted correctly to the tail
(or so I thought). You should look into the
manual to see how it's done. There were some
complaints in the reviews on the
Senior Telemaster Plus web page, but I had
actually no problem. I added a Nylon washer under the mounting plate
because the tailwheel's load has to be borne by that plate and the wheel
should still be easily swiveling. There must be no slack, either, because
else the load would be borne by the rudder and its hinges. The bending
forces are borne by the rudder, anyway. Oh well, it's a tricky design,
I wish it were different.
And again I should have come up with a better solution in the first place and not only later, when the rudder had been broken by the tail landing gear, which was no longer steerable and had to be replaced for these two reasons (see below).
The next thing is even worse. In this picture, and again in the one after the next, you see the elevators and their linkage. First thing to notice is a gap between stab and elevator that comes from a bit wavy spars. Next is the control horn on the left elevator half but only the three pre-drilled holes in the right half. Looks like they changed their minds from a traditional forked pushrod linkage to the actual setup with the servo in the tail, but of course I don't know. Anyway, now the elevator halves are connected by angled pieces of wire and a joiner with two set screws. You can best see that in the manual.
The wires are even flattened for the set screws but these soon ripped out the threads in the flimsy aluminum joiner tube. The metal piece from a luster terminal would have been a perfect replacement but the screws were too close to each other. So I made a new joiner from a piece of brass tube and two set collars, which may be visible in the pictures. The flattened ends of the angled wires are a good thing yet alignment of the elevator halves is still not perfect. But the whole elevator halves were built wavy and had to be straightened with a covering iron, anyway, so that's not an issue.
 This is the left stabilizer-half's bottom, showing the elevator's wavy
hinge spar (but not even how warped this elevator is), whereas the stab's
rear spar is straight. The right half is not nearly as bad, this one is
just so obvious that you get the idea.
There's actually no problem, though – the elevators, as all controls,
are quite effective even without sealing the gaps.
Just mind that the hinge pins have to be in line for ease of movement.
This is the left stabilizer-half's bottom, showing the elevator's wavy
hinge spar (but not even how warped this elevator is), whereas the stab's
rear spar is straight. The right half is not nearly as bad, this one is
just so obvious that you get the idea.
There's actually no problem, though – the elevators, as all controls,
are quite effective even without sealing the gaps.
Just mind that the hinge pins have to be in line for ease of movement.
There are four hinges on each half – good. But the torque from the control horn obviously goes through the hinge bar only – not so good. The control horn is the next issue. It's not too bad and even looks like perfect on the rudder. But you see that the rudder is a slab and that's why the horn's mounting plate and its counterplate as well as the mounting screws match perfectly. The elevator's triangular cross section doesn't actually match that control horn design and the screws barely reach into the counterplate. That's why I'll replace this horn by one like the aileron horns rather sooner than later, and I'll take a longer one for a better linkage geometry.
The elevator linkage is the only linkage where the control axis and the servo axis are at least nearly parallel (not quite because the fuselage is tapering). That means the clevises don't "tilt" too much in the horns, and clevises (not ball links) are applicable at all. I just had to bend the rod so the servo arm and clevis are aligned. But if clevises are used it should be such with smooth pins instead of threaded screws to avoid wearing out the holes in the arms. Ball links would be better because they are virtually free of play.
 I might stick to that rudder horn, though. The rudder is already
weakened by the cutout for the elevator joiner and by the angled
tailwheel wire, which sits in the rudder just where the control horn
is screwed on (see pictures in the manual). Maybe it would be even
impossible to drill a hole there for the other kind of control horn.
So I will look for the same kind of horn, only a bit longer, to get
a better linkage geometry. Exactly this size horn is explicitely
labeled "small" in the local hobby shop.
I might stick to that rudder horn, though. The rudder is already
weakened by the cutout for the elevator joiner and by the angled
tailwheel wire, which sits in the rudder just where the control horn
is screwed on (see pictures in the manual). Maybe it would be even
impossible to drill a hole there for the other kind of control horn.
So I will look for the same kind of horn, only a bit longer, to get
a better linkage geometry. Exactly this size horn is explicitely
labeled "small" in the local hobby shop.
The rudder linkage is one of those where the control axis and the servo axis are perpendicular to each other. That means the clevises are not only swivelling around the horns but also "tilting up and down". The clevis pins are screws with thread and will wear out the hole in the horn, but the clevises even have to be loose in the first place to work (tilt) reasonably well. Those "false" movements are quite big due to the big rudder throws and the short pushrod. That's why this linkage actually needs ball links both on the servo arm and on the control horn.
The Improvement
 All control linkages have been improved by substituting the control
horns and the clevises. Now the linkages are really free of play and
the R/C equipment's precision is shown to its advantage. After all the
Multiplex 2.4GHz digital radio link (M-LINK) has 12 Bit
(4096 steps) resolution, and the digital servos still have
11 Bit (2048 steps). That is well enough, and centering
accuracy and repeatability is outstanding, visible here on right
flap and aileron. (Note alignment of edges.)
All control linkages have been improved by substituting the control
horns and the clevises. Now the linkages are really free of play and
the R/C equipment's precision is shown to its advantage. After all the
Multiplex 2.4GHz digital radio link (M-LINK) has 12 Bit
(4096 steps) resolution, and the digital servos still have
11 Bit (2048 steps). That is well enough, and centering
accuracy and repeatability is outstanding, visible here on right
flap and aileron. (Note alignment of edges.)
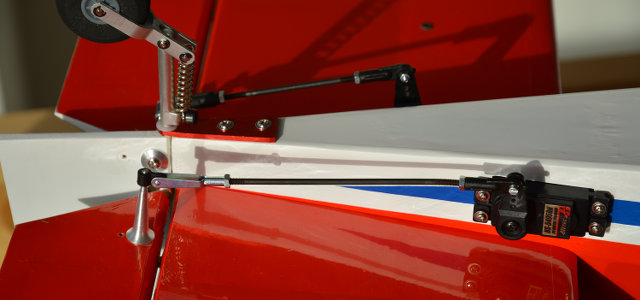
The control horns have been replaced by similar but longer ones. The lug for the clevis is screwed on instead of being clamped between two nuts. The clevis is simpler (steel sheet metal), is clipped on, and has a smooth pin which has no play in the horn's hole. On the servo arm is now a ball link which can swivel as well as tilt up and down without constraint. The flap pushrods have been shortened by a few millimeters. (My fault, the original length would have been better, as I realized only later, see comment on next picture.)
Due to the ball links and the longer control horns, servo travel is not as restricted as before. The aileron servo arm is still perpendicular to flight direction, but the flap servo arm is now turned back a bit in normal position (flaps up). Some travel backward and nearly the whole travel forward (from servo neutral) is used while only part of the forward travel had been utilized before.
 For the flaps, an even better solution would have been to have the
servo arm nearly perpendicular to flight direction in flaps-up position.
For flaps down, the servo arm would turn forward by nearly 90°,
making a knee-lever and this way reducing servo torque. That would
have required not a shorter, but an even longer pushrod (or rather
pullrod). I had only fully threaded rod that looks bad compared to
the nice black rods included in the kit, so I refrained from replacing
them, particularly since the linkage is quite serviceable now
(see below).
For the flaps, an even better solution would have been to have the
servo arm nearly perpendicular to flight direction in flaps-up position.
For flaps down, the servo arm would turn forward by nearly 90°,
making a knee-lever and this way reducing servo torque. That would
have required not a shorter, but an even longer pushrod (or rather
pullrod). I had only fully threaded rod that looks bad compared to
the nice black rods included in the kit, so I refrained from replacing
them, particularly since the linkage is quite serviceable now
(see below).
Now the flap servo arm is perpendicular to flight direction when the flap is 20° down. I use that for takeoff because it gives more lift without noticeably more drag. Besides, this flap setting makes for increased decalage, meaning a "slower" (flight speed) and really stable trim of the airplane. That is useful for traffic patterns, landing approaches, and dropping things from the Drop Box. The aileron is still in neutral position to have full roll control.
By the way, the nasty gap between wing and flap is my fault. The hinges are in fact screwed on flush, but around the hinge pins they are quite thick and I could, and probably should have made appropriate cutouts in the edges of the wing and flap spars. There is no aerodynamic problem with the gaps, though. In fact I think they can be even useful to help flap effect so I wouldn't seal them.
 The flap is 45° down here what is commonly used for landing
since it combines quite a braking action with maximum increase
in lift. I have a mixer set in the transmitter to droop both
ailerons, beginning at 20° flaps and going to 15° at
full flaps, what is seen here. That's a gadget, though, and
can be switched off.
The flap is 45° down here what is commonly used for landing
since it combines quite a braking action with maximum increase
in lift. I have a mixer set in the transmitter to droop both
ailerons, beginning at 20° flaps and going to 15° at
full flaps, what is seen here. That's a gadget, though, and
can be switched off.
In this position, the aileron will not move down when the aileron stick on the transmitter is moved to the left. It will only move up to neutral position for right aileron. That's default behavior and a good mixer feature in all Multiplex transmitters. Later I extended aileron throw to some down and more up lest aileron effect would be poor, and because there's no danger of tip stall either.
Another good feature is that I can set a slow flap servo speed. I chose 6 seconds (the maximum possible) for full travel (0° to 45°) so the airplane won't "jump" if it's actually too fast for flaps down. On the other hand, it has time to accelerate and won't plunge down when flaps are retracted at slow flight speed. Servo strain is reduced as well.
 If flaps and ailerons are flush to the wing root (as shown in the
picture above), they make for a reflexed airfoil. Maybe you can even
make out the reflex in that picture. The picture here (left) shows
that the wing root is a bit higher than the fuselage near the trailing
edge but a bit lower more forward. This reflex is built into the root
while the rest of the wing, in front of the rear spar, has true flat
bottom.
If flaps and ailerons are flush to the wing root (as shown in the
picture above), they make for a reflexed airfoil. Maybe you can even
make out the reflex in that picture. The picture here (left) shows
that the wing root is a bit higher than the fuselage near the trailing
edge but a bit lower more forward. This reflex is built into the root
while the rest of the wing, in front of the rear spar, has true flat
bottom.
As shown here, flap and aileron trailing edge have to be set about ⅛" lower to have a true flat-bottom airfoil (to be checked with a ruler). The flight characteristics are as expected that way whereas the airplane is trimmed for fast flight with the reflex.
By the way, if the model is not trimmed in the roll axis, I would correct that by adjusting aileron and flap on the downgoing side. I'd set both a tad down in the servo calibration.
 To the elevator linkage the same has been done as to the wing
linkages. The same kind of control horn replaces the very small
"conventional" kind of horn that was on the elevator
as well as the rudder before. Because it's substantially longer,
the ball link can now be put into the fourth (outermost) servo
arm hole instead of the second. The bigger part of the servo
travel (45° to each side) is now utilized giving maximum
precision, and even exactly 45° for increased (dual-rate)
throw.
To the elevator linkage the same has been done as to the wing
linkages. The same kind of control horn replaces the very small
"conventional" kind of horn that was on the elevator
as well as the rudder before. Because it's substantially longer,
the ball link can now be put into the fourth (outermost) servo
arm hole instead of the second. The bigger part of the servo
travel (45° to each side) is now utilized giving maximum
precision, and even exactly 45° for increased (dual-rate)
throw.
The bent pushrod has been re-used so the ball link is nearly parallel to the servo. The control horn has been put in the same place as the old horn. It could not be placed more inward because the angled steel wire for the elevator joiner is there. A new 3mm hole had to be drilled in the middle of the three old holes, where it seems not to weaken the structure any further. The clevis seems to be crooked but the shadows of the linkage in this and the next picture show that it's not. This linkage as well as the rudder linkage is truly symmetrical, meaning mechanically equal control throws in both directions. But the elevator linkage is the only one that has virtually symmetrical torque as well. By the way, on the rudder you see the bulging disk and the bolt head of the new control horn.
 It's one of the old metal horns from the wing because those were not
bad at all, just too short but just about right in terms of length for
30° rudder throw. One additional 3mm hole in the rudder is not too
much weakening, and the link axis (clevis pin) is at the same position
length-wise as the rudder axis (hinge pin). The impression of the old
short Nylon horn in the rudder is clearly visible as well as one hole
for it.
It's one of the old metal horns from the wing because those were not
bad at all, just too short but just about right in terms of length for
30° rudder throw. One additional 3mm hole in the rudder is not too
much weakening, and the link axis (clevis pin) is at the same position
length-wise as the rudder axis (hinge pin). The impression of the old
short Nylon horn in the rudder is clearly visible as well as one hole
for it.
Of course the steel wire, which makes the tailwheel swiveling axis, is still in the rudder. It runs vertically in front of the rudder horn and is bent backwards between the horn and the cutout for the elevator joiner. I believe it's even good that it is somewhat clamped by the screwed-on horn.
Because the lug is clamped between two nuts it can't swivel. Besides, the hole in the lug is too big so a clevis pin would have play. That's why I screwed on a ball link, which can freely tilt up and down without jamming. Of course, a ball link is on the servo arm as well because it must tilt as well (left and right in this case). The servo had to be turned around or else the linkage would be too short. (Fortunately, there was enough length in the extension lead.) Here as well, the linkage is now put in the fourth (outermost) servo arm hole instead of the second and nearly the whole servo travel (45° to each side) is utilized giving maximum precision.
This precision is actually not important here. Really beneficial is the absence of play in all linkages. Now I'm sure there's no danger of control flutter at least for this reason. The flimsy controls themselves could still give reason to flutter, though I'm confident that the low flight speeds will not suffice to cause flutter at all. But you never know in advance...
The Equipment
 That's what the business end of my SrTM+ looked like. (After a
repair including motor-mount replacement, and with a new ESC, it looks
quite different, see below.)
That's what the business end of my SrTM+ looked like. (After a
repair including motor-mount replacement, and with a new ESC, it looks
quite different, see below.)
Hobby Express recommended a ".60 size brushless outrunner" which is quite small and lightweight (see at their web page). I just preferred a motor available in the local hobby shop. It's a Hype (Kyosho) Alpha AL50/360L with 360 rpm/V kv value and 405g/14.3oz weight (as opposed to 380 rpm/V and 285g/10.1oz). Its bigger length/weight/power is not needed but isn't a problem, either. The motor is potentially more efficient than the smaller one, and the weight turned out to be even useful to get the C/G into the specified limits.
The propeller mount needed for rear mount of the motor and the retrofit spinner nut even add to the weight. I didn't like the crude hex-nut and threaded bolt there but I didn't want a real spinner either. This is the best solution since it's smooth and cooling air gets freely into the motor, whose colors go with the model's paint scheme.
The motor recommended by Hobby Express would have included a spinner nut and even gold-plated plugs, would be noticeably lighter, but – you know, I just preferred a motor available in the local hobby shop. Oh well...
They boosted the motor as being precisely manufactured. The first one I bought had one dead lead, one of the three leads of a brushless motor, what made it useless. Because I couldn't rule out the unlikely eventuality that I had damaged the lead with mounting screws too long by 2mm, I kept the motor and bought a second one. This one works but its rotor runs a bit off-center. Oh well, at least it was cheap. This seems to be one of those cases where buying cheap in the first place means buying expensive in the end. Next time I'll buy an AXi in the first place, even if I have to mail-order it. (And these Hype outrunner motors are discontinued, anyway.)
The thing attached with white tape is a telemetry temperature sensor. Another such sensor is attached to the battery. It's fun to monitor motor and battery temperatures just because it's possible today.
It's even more fun to monitor the most interesting values of an electric drive, and that is possible with the MULTIcont MSB EXPERT series of ESCs by Multiplex (now replaced by the even better ROXXY Smart Control - MSB). I have a quite old (2008) Multiplex ROYALpro9 transmitter, which has been upgraded to 2.4GHz with telemetry (in 2009). It suits me still very well and is all I need. That's why I'm using Multiplex receivers with their MSB sensor bus. There are still no other ESCs with telemetry functions compatible to this bus, so I have to use Multiplex ESCs as well. I'm quite happy with them, though.
Anyway, these ESCs report the battery voltage, actual current draw (amperage), motor rpm and ESC temperature. Above all, they add up the current draw to calculate the battery charge used up so far. Multiplex calls that "fuel gauge for the battery" what is quite appropriate. At least it's quite useful because you can take care of the battery by discharging only to the recommended 20% remaining charge. That would be impossible only by monitoring voltage because modern LiPo batteries hardly drop voltage during the main part of discharge. I just have to push the red pushbutton switch in the right corner of the picture to reset the discharge count after inserting a freshly loaded battery.
That being a great idea to begin with, it would be even better to include also the two temperature sensors in the ESC that are needed to monitor the motor and battery temperatures. That would complete the electric drive monitoring in one single unit. When later setting up the telemetry (see below) I wished the ESC would also somehow indicate any BEC overload, for instance by current draw or temperature or even both. However, after measuring servo current draw (see below) it seems I don't have to bother with that. But reporting not only the actual amperage but also its mean value during the flight would be really nice to have (to support charge-saving flight tactics).
Unfortunately, Multiplex had problems with the ESCs and I had to wait one and a half years (if I remember correctly) for the ESC's delivery. Then I had the 60A version, which I wanted but which was withdrawn soon after due to still unresolved technical problems. Indeed my sample blew with sparking during the tests in the workshop. Multiplex generously refunded the bad ESC (and was helpful in any possible way) and I bought the 40A version instead, which worked great.
Unfortunately, it could handle only 4s LiPo batteries (and 5s LiFePO4), but not the 5s LiPo I already had and which was recommended for the model. That was quite OK but now I needed a 4s 5000mAh LiPo battery in addition to the 5s 5000mAh LiPo I already had. So I had two batteries in anticipation of the working 60A ESC to come, two motors of which one was defective, and two propellers.
For the motor and a 5s LiPo battery, an APC 17x10E is nearly perfect, but a 17x12E is a tad better and for a 4s LiPo battery it's even required. Both propellers needed quite a piece of clear tape on one blade to balance, which is normal though. The non-precision hole in the propeller hub had to be drilled out, and one of the included precision locating rings is needed.
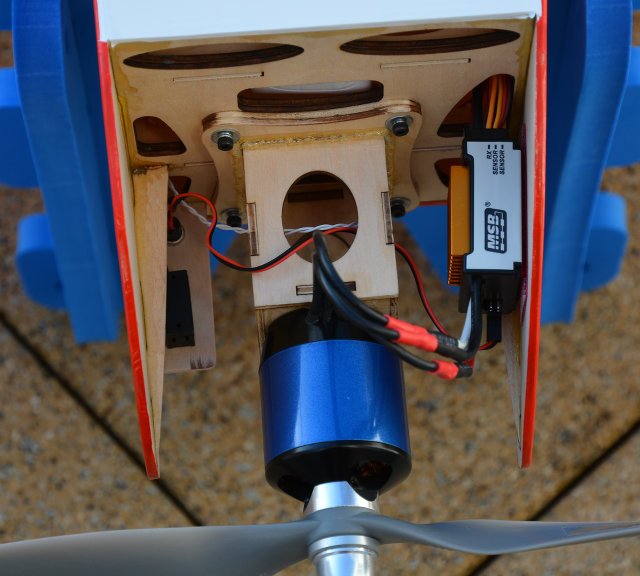 I installed the motor so the leads are running downwards and then
make for a nice curvature together with the ESC leads they are
connected to. This way they don't rub against anything and no
fastening is needed.
I installed the motor so the leads are running downwards and then
make for a nice curvature together with the ESC leads they are
connected to. This way they don't rub against anything and no
fastening is needed.
Similarly, the white cable from the temperature sensor is simply threaded through motor-mount and firewall holes. I twisted the two cores because I feel the cable is easier to handle in that shape.
You see that I threaded another, red-black cable through the motor mount. It connects the pushbutton reset switch (for the battery discharge count) to the ESC's "front side" (as seen in the picture), where it is plugged. Out of the ESC's "rear side" come three triple-core cables: to the receiver (both control signal for the ESC and power supply from the integrated S-BEC) and Multiplex Sensor Bus (MSB) "in" and "out".
On the "rear side" are also jumper plug-in positions for 5, 6, 7, and 8 V BEC voltage. I chose 6 V because the GPS used here needs 6 V minimum (see below) and because that's the servos' standard voltage (see above), which is by far sufficient for this model (see below).
The right inner motor bay should be a good place for the ESC. It's rated for 40 A continuous current but only if good cooling is provided. First I thought I should put the ESC on the motor mount's bottom but that would make for a cable tangle. I had hoped there's enough airstream in this place as well, and it turned out it is (see Telemetry below).
The firewall tilt for 2.5° right thrust is clearly visible here as well as the motor mount's offset to the left (in the picture as well as seen from behind) to have the propeller in the airplane's centerline. By the way, the screws needed to fix the motor to the mount (not visible) are not included and no washers either, neither in the ARF nor in the motor package. I bought Allen screws (with washers) of matching diameter and length, whereby I needed a second attempt to find out the correct length and possibly damaged the motor (see above). I secured the screws simply with nail enamel. The Allen screws used to fix the mount to the firewall (visible in the picture) are included in the ARF as well as washers and spring rings.
 Behind the firewall sits the 4s 5000mAh battery. It has to be as far
in the front as possible to achieve an acceptable C/G position. Despite
the battery's and motor's weight (550g/19.3oz, 435g/15.3oz), the C/G came
out at 163mm/6.4" aft of the wing's leading edge (45.3% of chord).
It should be between 5½" and 6½" (38.8% to 45.9%)
as per instructions so that's just within the limits. By the way, the
neutral point ist at 178mm/7" (49.4%), and with this balance the
model has 4.1% static stability margin, which I like. The C/G range
specified in the manual gives 10.6% to 3.5% static margin.
Behind the firewall sits the 4s 5000mAh battery. It has to be as far
in the front as possible to achieve an acceptable C/G position. Despite
the battery's and motor's weight (550g/19.3oz, 435g/15.3oz), the C/G came
out at 163mm/6.4" aft of the wing's leading edge (45.3% of chord).
It should be between 5½" and 6½" (38.8% to 45.9%)
as per instructions so that's just within the limits. By the way, the
neutral point ist at 178mm/7" (49.4%), and with this balance the
model has 4.1% static stability margin, which I like. The C/G range
specified in the manual gives 10.6% to 3.5% static margin.
From the temperature sensor on the motor runs the white bifilar cable to the pertaining sensor bus unit, the small box on the fuselage's left inner side. Another such cable runs in a bend to the temperature sensor under the battery. The temperature sensor box is a member of the Multiplex Sensor Bus MSB and is here connected to the receiver by an extension cable. On the other side it's connected to the FlightRecorder, the small box farther fore. That in turn is connected to the ESC which is by an extension cable connected to the GPS far back in the fuselage.
I could have used a Y-cable from the receiver's MSB port running to the temperature sensor on one side and the GPS on the other, but I learned about that option only later when reading general instructions for the Multiplex sensors. And I left it as it was then because it allows to disconnect the GPS from the bus and connect it to a PC for setup without opening the bottom hatch or removing the Drop Box. Only later, when the ESC was replaced by a new one with only a single sensor bus connector (see below), the wiring had to be modified, and is actually better now.
 The battery is too long to be put across into the fuselage what would give
a more fore C/G.
Wouldn't it be easier to do without any mount? A firewall more forward, where
now the mount's front is, would be smaller and lighter. The firewall could have
the motor's hole pattern and the motor could be mounted directly by the four
Allen screws turned in from the back of the firewall. For shorter motor types,
spacing sleeves and longer bolts could be used. The battery and the C/G could
be more fore and a lightweight motor could be used.
The battery is too long to be put across into the fuselage what would give
a more fore C/G.
Wouldn't it be easier to do without any mount? A firewall more forward, where
now the mount's front is, would be smaller and lighter. The firewall could have
the motor's hole pattern and the motor could be mounted directly by the four
Allen screws turned in from the back of the firewall. For shorter motor types,
spacing sleeves and longer bolts could be used. The battery and the C/G could
be more fore and a lightweight motor could be used.
Anyway, I wonder why the model's designer adhered to the "conventional" solution of a separate motor mount. It is so special that nothing else could be mounted to the firewall and only a motor with the same hole pattern can be used. What I can imagine is that there are IC engine mounts with the same hole pattern as in the firewall. That way one could install even a four-stroke glow or gas engine between the fuselage side walls. But Hobby Express doesn't recommend that, in fact they don't even mention it. (That might mean it's possible but it'll be on your head.)
In this (and the next) picture you see that they generously applied glue to the fuselage structure. That could add up to some weight in the whole model. On the other hand, the motor mount seemed to have rather too little glue and I tried to give it a bit more to reinforce it. That turned out to be not really effective and after a mishap I ended up with a self-made metal motor mount (see below). I could and should have replaced the wooden mount in the first place, as well as the control linkage parts, but I knew (or realized or accepted) either only in hindsight.
The small device behind the battery is not a sensor but the so-called (by Multiplex) AntiFlash. It's plugged between ESC and battery to prevent sparking when the battery is plugged (and unplugged). The thin red/black cable goes to the black sliding switch in the small board next to the motor mount. This safety switch must be off (red dot) when plugging or unplugging and is set on (green dot) only for flight to prevent the motor running accidentally. (I know that some people would put the red and green dot the other way around, but this way is intuitive for me.) Since the BEC is integrated in the ESC, the receiver is switched by this switch as well. And now you have to wait (at least one minute) for the GPS finding enough satellites to calculate meaningful data...
 On the left side is again the AntiFlash with the green Multiplex connectors
rated for 35A continuous and 60A peak current. The thin red/black cable
to the switch comes out of the device's side.
On the left side is again the AntiFlash with the green Multiplex connectors
rated for 35A continuous and 60A peak current. The thin red/black cable
to the switch comes out of the device's side.
On the right side is again the temperature sensor box with the two white bifilar cables to the sensors on motor and battery. The two bus cables come out of the box's rear side.
Above the AntiFlash is a piece of thin yarn attached to a longeron. The other end is bound to an extension cable which is plugged into the receiver's Battery/Data port. I use it to set up the receiver without having to remove it from the model, which would be tedious. The yarn is used to fish the cable out of the fuselage where several cables are running over the wing joiner tube to the receiver and the GPS.
Again, the firewall tilt for 2.5° right thrust is visible here as well as the motor mount's offset to the right (in the picture, left seen from behind) to have the propeller in the airplane's centerline.
Behind the firewall inside the left and right fuselage sides are the magnets that hold the hatch in place when it is latched under the "front window". Three times I lost the hatch in fast flight when it was blown off by the ram air pressure in the fuselage. At least that's what I believe, and it helped to put a washer on one magnet to reduce the air gap between fuselage and hatch magnets, and to glue another two magnets to hatch and firewall, respectively. One magnet was loose and had to be re-glued, anyway. Finally, I got into the habit of putting a strip of polyester adhesive tape across the hatch to fix it to the fuselage. That may look primitive but it's better than the usual massive latch on the thin hatch.
Because the battery has to be as far forward as possible, the bearer plate could be much shorter; the whole part behind the battery is not used if no payload is placed there. Yet it has probably the function to form a sturdy box, together with the lower fuselage parts, that can bear the loads of lift and landing-gear struts. Anyway, if the firewall would be relocated more forward to save the motor mount, the battery plate had to be relocated or extended more forward as well. That might bring the C/G more to the forward limit specified in the manual. Because the model is quite heavy already it would be kind of stupid to add weight in the nose to get the C/G right, even if the weight were a battery.
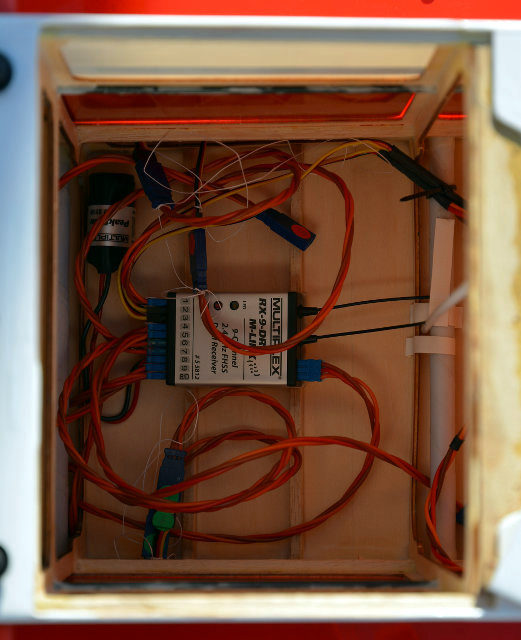 It's dark inside the fuselage, but you can still clearly see
the model's "nerve center", the receiver and the tangle of
cables running into it (or out of it).
(After upgrading the receiver to the WingStabi, this looks a bit
different, see below.)
It's dark inside the fuselage, but you can still clearly see
the model's "nerve center", the receiver and the tangle of
cables running into it (or out of it).
(After upgrading the receiver to the WingStabi, this looks a bit
different, see below.)
Of course most of them are servo cables. There are short extensions for the four wing servos. With a piece of yarn I bound the extension sockets to the fuselage sides where the cables run into the wings. By that means I can fish the cables out of the fuselage to plug the servos without opening the hatch on the fuselage bottom (or even removing the Drop Box, if used). All plugs and sockets are tagged with a red or green dot (port or starboard) and the channel number. By means of the extensions I avoid (1) having to open the bottom hatch to plug the servo leads and (2) wearing the sockets in the receiver.
We are looking through the opening in the fuselage's bottom onto its "ceiling". Top and bottom in the picture are the left and right fuselage sides with openings to the wings. The receiver sits between them. On the right side, which is the rear side of the fuselage, is the light grey cardboard tube for the wing shear tube and on the left side (hardly visible) the thicker cardboard tube for the wing joiner tube. The cables are laid over (under in the picture) one of the tubes so they are held by them. No further fixation is needed except for the tail servo cables which didn't fit and which are tied with a black zip tie.
It's a 9-channel dual receiver so two antennas come out of it on the right side. The black cables are the "inactive" parts of the antennas, ending in short silver active parts (the actual antennas). One antenna runs to the rear and points backwards (opposite to flight direction, see next picture), the other one goes into the thin white plastic tube (on the right side) pointing vertically down. Both are fixated with pieces of white tape. The receiver is even twin-receiver diversity-capable, meaning a second receiver could be connected which would contribute a third antenna, now in wing direction. I think that would be overkill, though. (Proven true by actual telemetry data.)
I adopted the Multiplex channel assignment. Channels 1 and 5 are designated for the ailerons, and I used the undesignated channels 6 and 7 for the flaps, as usual. All four are connected by the short extension leads mentioned above. Channel 2 is elevator, 3 is rudder, and 4 is ESC, which in this case is power supply as well because the BEC is in the ESC. The thereby unused Battery/Data (B/D) port is instead used for the extension mentioned above, which can be used to set up the receiver with a PC.
Channel 8 is used to switch modes of the Souffleur (Prompter), Multiplex's telemetry voice-output device that works directly with the receiver's telemetry radio signal and the transmitter's control radio signal (see below). The hence spare port 8 is used for the PeakFilter, which is the black cylinder with silver label in the upper left corner. It's meant to protect the receiver from voltage peaks, just in case. (Really needed if I'd use a diode-based battery backer.) Channel 9 is used to release the Drop Box lids and has a short extension plugged in.
The lead coming out of the receiver's right side is the Multiplex Sensor Bus (MSB). It goes forward up to the ESC and comes back as the lead running left to right below the receiver. It goes to the last member of the bus, the GPS, which is hidden in the lower right corner of the picture. Below the MSB socket is another Battery/Data socket in the receiver. It could be used to connect another receiver for even more "diversity", as mentioned above. It's not used, though, because neither another antenna nor more sockets for servos are needed in this case.
 This is the receiver antenna pointing backwards. The silver active part
is at the end of the black cable. I hope the antenna is far enough away
from the carbon longerons (one visible in the upper left corner of the
picture). The two cables next to the antenna are the rudder and elevator
servo leads. They are here because the picture was shot with the fuselage
upside down. If it's upright the cables lie on its bottom, far away
from the antenna.
This is the receiver antenna pointing backwards. The silver active part
is at the end of the black cable. I hope the antenna is far enough away
from the carbon longerons (one visible in the upper left corner of the
picture). The two cables next to the antenna are the rudder and elevator
servo leads. They are here because the picture was shot with the fuselage
upside down. If it's upright the cables lie on its bottom, far away
from the antenna.
I used these thick, twisted leads for all extensions. Maybe it's a bit paranoid but I think such long servo leads should be thick to avoid too much voltage drop at the big currents that digital servos draw. And they should be twisted to avoid electric noise. Fortunately even the digital servos turned out to be quite thrifty, maybe because I use the high-voltage servos at only 6V. Anyway, these elaborate leads do no harm and I even made the extensions by cutting the stock servo leads apart and soldering these twisted leads in between, just to save connectors and keep resistance low. I cut the cores 10mm apart from each other (staggered) so I needed only one 30mm piece of shrink tube around the whole lead for insulation. And I used short pieces of shrink tube about 100mm apart from each other to secure the twist.
Especially the rudder and elevator servo extension leads make for noticeable weight in the airplane's tail, and the two servos themselves make for even more tail weight. Meseems it could be better to have the two servos close to the receiver, as was common in earlier times, and use modern pull-pull cables to the controls. That would make the tail much lighter and make a much better linkage. Since the model is a bit tail-heavy, anyway, that would be a second measure to get the C/G farther forward, in addition to setting the firewall farther forward. And a lighter tail gives smaller moments of inertia and thus an even better flight behavior as a bonus.
An intermediary, even if elaborate solution would be putting one mini servo in each stab half (possibly with auto-plug) and using only one red (+) and one brown/black (−, ground) core for all three tail servos and an own yellow/orange (signal) core for each in a combined extension lead. That would reduce tail weight at least a bit. (Or so I thought; actually it didn't overall, see below.)
 The GPS is special in several respects. Its main advantage is that it
supplies virtually all flight data – altitude, distance, course,
speed (save a variometer function) – as one single device.
But – curiously – it has only one connector to the
Multiplex Sensor Bus MSB, so it has to be the last device in the chain,
the receiver being the first, or it needs a Y-cable.
It refuses to work below 6 V receiver voltage, so that was the
actual reason to use high-voltage servos in this model.
And it could be easily troubled by bad reception conditions.
The GPS is special in several respects. Its main advantage is that it
supplies virtually all flight data – altitude, distance, course,
speed (save a variometer function) – as one single device.
But – curiously – it has only one connector to the
Multiplex Sensor Bus MSB, so it has to be the last device in the chain,
the receiver being the first, or it needs a Y-cable.
It refuses to work below 6 V receiver voltage, so that was the
actual reason to use high-voltage servos in this model.
And it could be easily troubled by bad reception conditions.
(Fortunately, there is no problem but rather surprisingly precise positioning, see below. And meanwhile, Multiplex brought out a new version 2 with an even better antenna and with lower voltage demand as well, though still without variometer function.)
That's why it sits here, on the upper right fuselage side where the wing's trailing edge is. On the right side of the picture is the rearward receiver antenna, the vertical white tube in the foreground contains the downward receiver antenna. The black line under the GPS is one of the two carbon longerons that run along each inner fuselage side. And the lead from the GPS goes to an extension lead to the ESC and runs over the cardboard tube for the wing's aluminum shear tube. The GPS antenna (the stub on top) is now equally far away from each of these "radio signal traps" and is pointing upwards as it should do. There's just no better place in the whole fuselage. The GPS now works and delivers flight data via the MSB to the FlightRecorder and the receiver – sigh...
Weight and Balance
Weight
Finally the model weighed in at 4.54 kg, which is a tad more than 10 lb or about 160 oz. With the 60A ESC and the 5s battery it would weigh 35g+55g=90g (3.2oz) more, and the optional Drop Box weighs 110g (3.9oz) including micro servo for lid release. That would add up to 4.74 kg (10.4lb/167oz) and leave only 260g (9.2oz) for payload, if the German weight limit for flying outside of approved model airfields (5kg) is observed. Not even 10oz may be not much candy for a bunch of children on an air show, but then again it will be on an approved airfield. The model is able to carry a lot more weight, it's just that it actually should have less empty weight.
Even the manual specifies 9 lb all-up weight. The very first version of the Senior Telemaster weighed only 2.7 kg (6lb/95oz) as built in 1973 by the venerable Radio Control Modeler (RCM) magazine. The redesigned version wasn't much heavier, 2.95 kg (6.5lb/104oz) as built by RCM in 1975. These seem to have been reference builds to demonstrate minimum tare weight. Even in that same year, Hobby Lobby advertized the model specifying 3.175 kg (7lb/112oz) all-up weight. Over the years they became even more cautious or the model heavier, respectively. Anyway, in 2007 they specified 4.5 kg (10lb/160oz) on their web page, so it's actually baffling that they now specify 9 lb in the manual.
Obviously 10 lb is more realistic. Of course I contributed to the "excess weight" with the 120g (4.2oz) heavier motor and the 90g (3.2oz) 40A ESC. The 60A ESC would weigh even 125g (4.4oz), and the 5s battery would weigh 130g (4.6oz) more. But this weight is even needed to get the C/G within the limits. The "better" servos may weigh 10g (0.35oz) more each, 60g (2.1oz) total, and surely the heavy extension cables add their share. But the hardware delivered with the model is quite heavy and the airframe as such as well. I weighed the parts of the completed model with an electronic scale:
| wings without tubes | 1190g | 42.0oz |
| fuselage with stab | 1484g | 52.3oz |
| wing tubes and lift struts | 320g | 11.3oz |
| landing gear with wheels | 367g | 12.9oz |
| battery 4s 5000mAh | 548g | 19.3oz |
| motor with prop shaft | 433g | 15.3oz |
| prop, motor mount, hatches | 139g | 4.9oz |
| Drop Box | 110g | 3.9oz |
| total empty weight | 4591g | 161.9oz |
That shows there is no single source of excess weight but all parts contribute. Above I mentioned several ways to save weight, all being costly. They all related to the delivered hardware, but now we have to consider the airframe as well. I can't say if there is too much glue applied to the structure, if the covering with its big area is heavy, or if the wooden structure itself is heavy, or all that at the same time. Only the designer can tell, but I can look into the indications:
Inertia
The model has been not only weighed and balanced, but also measured in several ways. Where the balance point was in the first place, 163mm/6.4" aft of the wing's leading edge, the wing is 47mm/1.9" thick and the fuselage is 210mm/8.3" deep. The C/G is only 85mm/3.3" below the wing's flat bottom, but 125mm/4.9" above the fuselage's bottom. That is despite the weight of battery, ESC, and motor quite low in the fuselage and despite the landing gear even lower. So it means the wings just must be quite heavy and the rest of the airframe as well since it's designed and built similarly.
Another indication reinforces this conclusion. The completed model's moments-of-inertia have been measured by gimbaling it and measuring the pendulum frequencies around all three axes. Blaine Beron-Rawdon's RadGyr spreadsheet, belonging to his Plane Geometry calculations, yielded 0.18/0.28/0.24 relative roll/pitch/yaw radius-of-gyration. That is a bit more than the 0.17/0.28/0.21 values of my similarly shaped Brummi parkflyer whose C/G is a bit lower. This might mean that especially the Senior Telemaster Plus wings are heavy, what is no wonder though considering they have big ailerons and flaps and two servos quite far outboards. The two tail servos add to the big yaw radius of gyration.
By the way, the absolute moments-of-inertia are 0.83/0.83/1.47 kg·m² (roll/pitch/yaw) for the 10 lb weight the model now has, but they would be merely 0.66/0.66/1.18 kg·m² at only 8 lb weight, which is rather what I had expected. I consider this as a strong indication that the airframe is a bit heavy. The model has still quite a low wing loading and can carry a lot of load. But since the weight (mass) seems to be spread all over the airframe, less weight should make for smaller moments-of-inertia and hence an even better, even more responsive flight behavior. And a wing loading lower than 53.4 g/m² (17.5 oz/sq.ft) like now would be even more characteristic of the model, for instance 42.7 g/m² (14.0 oz/sq.ft) for 8 lb weight what is not even really low for a Senior Telemaster. Yet wing loading and inertia at 10 lb weight are actually low compared to most other models – it's still a Senior Telemaster.
Balance
For more clearness, the C/G positions (or balance points) behind the wing's leading edge are combined here in a breakdown. The first actual balance point was hardly within the specified range, which gives unusually small static stability margins (for a Telemaster, anyway). I like it that way, though, and the model is even balanced for best glide.
After the repair including motor-mount replacement (see below), the new motor mount weighs a bit more and the battery can be put even closer to the firewall. That moved the balance point a bit forward (actual C/G position 2), giving slightly more static stability margin. The difference in flight behavior is hardly noticeable, though.
Then, after the tail repair and retrofit (see below), the whole tail is a bit heavier than before. That moved the balance point close to its rear limit again (actual C/G position 3, even though it is hardly measurable). That gives a rather small static stability margin now, but the difference in flight behavior is still acceptable.
| Position behind L/E | inches | millimeter | % of chord | static margin |
| fore limit of C/G | 5.5" | 140mm | 38.8% | 10.6% |
| actual C/G position 2 | 6.1" | 155mm | 43.1% | 6.3% |
| actual C/G position 1 | 6.4" | 163mm | 45.3% | 4.1% |
| actual C/G position 3 | 6.45" | 164mm | 45.6% | 3.8% |
| rear limit of C/G | 6.5" | 165mm | 45.9% | 3.5% |
| Drop Box center | 7.0" | 178mm | 49.4% | |
| neutral point | 7.0" | 178mm | 49.4% |
An interesting point is the Drop Box position. I had suspected that it would shift the C/G too far back when filled. Now the measurements show that it's located exactly in the neutral point what is only 15mm aft of the C/G in my case. The Drop Box with a 260g charge would shift the C/G back by 1mm, and with a decent charge still by only 2mm, right to the rear limit. Cool!
Incidences
The quite rearward balance (C/G position) matches the incidence angles I measured on the model. These are different from those I measured in the plans of the "old" Senior Telemaster brought out by Hobby Lobby in 1975. Obviously it had a rounder wing leading edge giving more angle between the flat bottom and the airfoil chord line, or my measurement with the Multiplex incidence meter was wrong. Anyway, yet the flat-bottom incidences are smaller on the Plus. The zero-lift angles-of-attack are guesses since there are no wind-tunnel airfoil measurements.
| Sr. TM Plus | old Sr. TM | |||||
| wing | stabilizer | decalage | wing | stabilizer | decalage | |
| flat bottom incidence | +3.0° | +2.0° | +4.5° | +2.0° | ||
| + chord-to-flat-bottom | +1.0° | +0.5° | +1.5° | +1.0° | ||
| = geometric incidence | +4.0° | +2.5° | 1.5° | +6.0° | +3.0° | 3.0° |
| − zero-lift angle-of-attack | −2.5° | −1.5° | −2.5° | −1.5° | ||
| = aerodynamic incidence | +6.5° | +4.0° | 2.5° | +8.5° | +4.5° | 4.0° |
| (thrust offset down/right) | −4.0° | +2.5° | −3.0° | +2.0° | ||
| (dihedral) | +2.0° | +3.8° |
A bit surprising is that the Plus' decalage is smaller but its thrust offset is bigger, yet that's consistent. As mentioned above, the smaller decalage matches the more rear C/G position, and the bigger down-thrust prevents any nose-up tendency allowing a wide speed range in horizontal flight. The "old" Senior Telemaster with its 4° aerodynamic decalage was balanced more foreward at only 36% of chord length, making for 13.6% static stability margin, so it was noticeably more stable. Together with the smaller down-thrust, that made for a certain fixed cruise speed as well as an automatic climb at full power and an automatic glide at idle power. Lateral stability is different as well: The SrTM+ has less dihedral than the "old" 1975 SrTM, which had even more than the 1973 original (3.3°). The Plus' more "modern" setup gives different but just as enjoyable flight characteristics.
Throws
Of course the control throws contribute to the flight characteristics, that's why they are summarized here as per the manual. It specifies the control throws in millimeters and "as much as you want" for flap deflection. I converted the throws into degrees (°) and chose 45° flap deflection as I saw fit.
| Control | left/up | right/down | left/up | right/down | differential |
| rudder | 35mm | 35mm | 30° | 30° | |
| elevator | 20mm | 20mm | 20° | 20° | |
| ailerons | 25mm | 20mm | 18° | 15° | 20% (rounded up, actually 16.7%) |
| flaps | 45° |
The throws are quite right in the simulator as well as in reality. They suffice for all practical purposes, especially landing and side slip (crossed controls). Elevator up is an exception since I feel the need for more up throw when flaring, so I set 25° dual rate.
Aileron differential is OK but coordinated rudder is still needed, for instance 50% rudder with 100% aileron thrown by a Combi mixer. I even use different differential and mixing rates in different flight modes.
45° maximum flap deflection is a common value since it combines quite a braking action with maximum increase in lift. For takeoff, I use only 20° for more lift without noticeably more drag. Besides, this flap setting makes for increased decalage, meaning a slower and really stable trim of the airplane. I even have a mixer set to droop both ailerons, beginning at 20° flaps and going to 15° at full flaps, to boost this effect. That's a gadget, though, and can be switched off. But there's no problem with a "tip stall", as you might think, because flaps down make for quite some washout.
The Bottom Line
... just as a few notes:
- Narrowly – still a typical Senior Telemaster (weight).
- Typical features better than ever.
- More "neutral" flight behavior – appreciated.
- Good American engineering, yet could be even better.
- Less than perfect Chinese quality, still not too bad.
- Not even cheap but unsuitable hardware, barely useable.
- The airframe is too heavy for flying off-field in Germany.
- The airplane is all but tail-heavy.
- It's a good and affordable model.
- It could be so good – for a few dollars more!
- It could do with a re-engineering already.
- It's a "keeper", I would buy it again.
The Good, the Bad, and the Ugly
Sorry, I just like to allude to the title of this classic Spaghetti Western. There are even allusions to the other two of the Dollars Trilogy. But it seems there must be these categories in reviews even if there's nothing really bad. So let's see it with a wink and with a grain of salt.
Isn't it funny? All the praise in the advertisements is true! No kidding, I'm serious. Hobby Express's Senior Telemaster Plus web page is even quite factual and not at all gushing. And if you look at the reviews there, you'll find that they are all true as well. Isn't that great? Hobby Express let's the model owners give you all useful information you may wish for, even if it's criticizing. And everybody is objective from his point of view and not hypercritical, giving a well-rounded 3.5 average rating. (My rating is 4 out of 5, where 5 would mean perfection, see the latest review.) Please understand me in the same way:
The Good
It's important to declare that: Yes, this is a nice and good model airplane,
I like it. All the enhancements compared to the classic Senior Telemaster
are appreciated. It's well engineered. It has a nice paint scheme. It flies
great, in the simulator as well as in reality. And it's affordable –
for a fistful of dollars.
The Bad
Well, it could be even better – for a few dollars more.
Just a bit better (read: suitable) hinges, control horns, pushrods, joiners,
tail landing gear – is that too much to ask for? A bit more careful
application of glue? And why isn't there any revision/"facelift",
for instance pull-pull linkages at least for the tail or a simpler firewall
without an intricate extra motor mount. The model is so heavy – and
tail heavy – that it's barely a typical Senior Telemaster –
that's too bad.
The Ugly
What means ugly? Well, what I find kind of "ugly" is the marketing
concept – I just don't understand it. The model is made quite cheap,
they include cheap hardware, they recommend cheap servos, motor, and ESC.
Are most buyers cheapskates so that's the only way they can sell any numbers?
I would happily pay for better hardware and a lighter airframe, as I did for
better servos and ESC (and should have done for the motor). It would not even
be expensive, but there's no such option. What do they think who I am? That's
what annoys me.
What I will do
I'll maiden the model – really. (Done fall 2015. Oh well, why do we have so much wind?) For some reasons, for most of which I'm accountable, I've had the model for two and a half years before I completed it. I didn't expect any surprise, though; the simulator model flies great and should be realistic. In fact it turned out to be.
I will skip the 60A ESC and sell the 5s LiPo battery I already have. (Done January 2015.) The 40A ESC can cope with 5s LiFePO4 and I'll buy such a battery as I intended in the first place. I can use both propellers I have, which each give the model a slightly different character. I will stick to the heavy motor to keep the C/G position in the required range.
I will keep the aluminum wing and stab tubes and not replace them by carbon tubes. That alone would save too little weight, even in the tail, to be worth it.
For the elevator I will buy the same kind of control horn that is now on ailerons and flaps. For all I will buy longer ones. All clevises will be replaced, those on the control horns by better ones (more precise with unthreaded pins) or even ball links and those on the servo horns by ball links in any case. That will get rid of jamming and sticking linkages and give full servo travel, which means more precision and less servo load. (Done January 2015, see above.)
I'll skip the Drop Box since I couldn't use it as long as I don't fly from chartered model flying fields and the possible 260g (9oz) payload is not even sufficient for an R/C skydiver. And it's not allowed to drop anything without explicit permission in Germany, anyway. (But it turned out that my club has an annual event for kids at its flying field, and candy-dropping is traditionally done there. So now I can even use the Drop Box for what it's intended.)
What they should do
"They" should have the Chinese manufacturer use a bit less glue (less weight) and a bit more precision (better aligned wing and stab joiner tubes, elevator straightness, and rudder/tailwheel joiner fitting) in building the airframe. (-100g)
If the covering is film with hot glue, they could use film without glue and instead apply glue only to the airframe. That would mean more work but noticeably less weight. (-150g)
They should provide really suitable hardware – at least longer control horns, clevises with smooth pins, ball links, maybe even flat hinges and maybe even dismountable hinges. (-0g)
They might offer the option to buy carbon joiner tubes, lift struts, and landing gear instead of the aluminum/steel ones. (-320g)
They should provide a different tailwheel assembly, which is not force-fit to the rudder and easier to install/adjust (see my retrofit below). The rudder would be better without the angled wire inserted and with an additional hinge close to the control horn instead. (-0g)
They should put the tail servos in the fuselage between the wings, provide a pull-pull linkage for the rudder, and elevator joiner pins plugged into a fixed central control horn (like for all-flying stabilizers). Would be a much better linkage, would be simpler (mind the servo trays in the tail, and the weakening rudder cutout), maybe won't even cost more (because it's simpler, and mind the extension cables), and would reduce weight a bit and moments of inertia noticeably (better flight behavior). Besides, probably that alone would solve the rear C/G problem. (-30g)
[A compromise worth considering would be putting one micro servo (e.g. HS-5087MH) into each stabilizer half (see my retrofit below). That would be kind of expensive but weigh the same and have even more torque. It would be easy and save the elevator joiner and the rudder cutout, which both are not exactly good solutions. The servos could be automatically plugged in the model's tail when rigging up.]
They should re-engineer the fuselage to save the motor mount – even at the cost of ruling out IC engines – and thus have a more forward firewall and battery tray. In case it could also be smaller this would save some weight directly. In any case, it would save weight indirectly by relocating the battery more forward and allowing for a smaller, lighter motor without spoiling the C/G position. This could even save some cost. (-200g)
[Another compromise would be a metal motor mount like I made as a repair (see below). The firewall could be much simpler (not as riven as now) and hence stronger. And that would just not rule out IC engines but would be even better suited for them.]
They should re-engineer the wings. The flaps could begin right at the fuselage sides, that would be simpler and more effective (as far as I can tell). And couldn't they omit sheeting the outermost rib bays (as well as the stab's) to reduce moments-of-inertia?
They should provide a bit longer pushrods for the flap linkages. To give us a clue, they should point out in the instructions how to set up the flap linkages with a knee-lever effect reducing servo torque (see below). Maybe they could even set the flap control horns a bit further back. Both would require them providing ball links instead of the clevises.
Actually they should make do with only two wing servos. I think it would be quite a bit better than now if the ailerons and flaps would be driven by conventional linkages, or even better by modern pull-pull linkages. That would save the four servo trays in the wings and be lighter, simpler, and cheaper. The roll and yaw moments-of-inertia would be noticeably lower, giving better roll and yaw response and damping. The servos could sit in the fuselage between the wings and would be mechanically connected to the linkages in the wings, for instance with ball links. And only one servo each for ailerons and flaps would be well enough torque-wise. (-150g)
[Another compromise would be using four micro servos (e.g. HS-5087MH) in the wings. That would be expensive but save some weight and moment of inertia. Servo torque would be still more than enough. (-100g)]
My weight-saving estimates in parentheses add up to -950g (2.1lb/33.5oz) – not too bad. Nothing else to do for "them"? Couldn't they make the whole airframe structure lighter? Or did they already, while my copy is from the first production run and three years old? I don't think so. I'm immodest, I know, but I will further think about it. ;-)
What you should do
In case you acquire a SrTM+ I'd recommend the following:
Skip most of the hardware. Really suitable control linkages is actually a must, a better tailwheel assembly not quite. Better main wheels are for peace of mind, and you might contemplate a metal motor mount (see below).
If you do use the included tailwheel assembly, make sure that its swiveling shaft is in line with the rudder hinge pins. If you don't use it, add a hinge close to the rudder control horn. (See below.)
You might have to make your own (better) elevator joiner.
Make sure that wing and horizontal stabilizer are parallel. Check regularly and readjust if need be.
Set flaps and ailerons so the wing has a flat-bottom airfoil. Don't use the wing root as reference, it might be reflexed.
Make sure the fuselage front hatch is secure. It might be blown off by ram air pressure in the fuselage. A hole in the fuselage bottom would let battery cooling air out and reduce the pressure.
Set up-elevator throw to 25°, not only 20°. You may set up a dual-rate switch and use full throw for landing.
Set up the flap servos for a knee-lever effect, if you like even with a longer pushrod (see below). This is not possible with the stock clevises, you'll need ball links at least on the servo arms.
For the wing servos, use short extension leads plugged into the receiver. That saves opening the bottom hatch or removing the Drop Box for plugging the wing servos (and avoids wearing the sockets in the receiver).
You could even install fixed sockets in the fuselage and fixed plugs in the wing, which are plugged automatically when the wings are mounted.
If you like to spend somewhat more time and money on this model, you might use micro servos for the ailerons, put one micro servo in each stab half (possibly with auto-plug), and make a pull-pull rudder linkage.
One servo in each stab half requires one additional R/C channel and servo lead. Using shared, thick red (+) and brown/black (-, ground) cores for all tail servos and an own thin yellow/orange (signal) core for each in a (self-made) combined extension lead would save at least some tail weight. (See my retrofit below.)
Be prepared for a C/G quite (or even too) far aft. A big motor and/or battery may be not too bad; big servos in the tail are bad for sure.
As recommended by Hobby Express, use a 380 kv motor by all means (or even only 360 kv as I did). But take a 17x12E propeller instead of the recommended 17x10E if the motor is powerful enough for that (it should be if only a 4-cell battery is used). I just think the 17x12E is better suited to this model (see below).
"Should" means really recommended, "would" and "might" are for the ambitious. For more information about any of these topics, please just search this web page (Ctrl-F).
Flying
Still I can't show you a video of my SrTM+ flying, but there are videos by other people. Hobby Express had an advertizing video, but the new owner removed it. The video showed a dynamically flying SrTM+ as well as short takeoffs and landings. Of course they emphasized the model's best side, but there's nothing wrong with that; it just requires a strong drive. The 2011 review at RC Groups is still available and has a good demonstration flight video with several short take-offs and landings.
There are three "private" (non-commercial) videos with an as well powerful SrTM+ but showing the model's floating characteristics. The first flight in the maiden flight video ends (at about 6:20) with a typical landing. Porpoising is kind of a trait of this model and at first it may be not quite easy to do a smooth and gentle landing with it. But at least the second and third landings in the video (at 9:43 and 12:40) are smooth and show how it's done. The second video again shows a short takeoff and vigorous climb, followed by a few impressive glides. The landing (at 4:20) is another porpoising one, dissatisfying the pilot (at 5:00). The next flight (at 8:12) has another one (at 9:43), followed by yet another one (at 11:25). There's even a third video with another flight (at 4:46) but without the landing shown.
There are yet more videos, for instance another maiden flight video. In this part 5 of the video is the landing – another typical porpoising or bumpy landing. But at least it's a short one and the spectators are satisfied, so it's a good landing. Finally yet another maiden flight video, from 2012, soon after the model came out. This landing is a fast but smooth wheel landing, which is easier to do than a three-point.
Two smooth landings out of six is about the same proportion I have in my simulator demo flight (see as HD video). Actually it's even only one out of four. That goes to show that the simulator model is realistic and thus applicable to practice flying and landing the SrTM+. In doing that, I found that there is virtually no porpoising if the model is balanced at the fore limit of C/G. In this case it's just trimmed considerably faster and needs much more elevator throw (30° instead of 20°). But it's impossible to bring the C/G forward by one inch (the C/G range) on my real model because the necessary weight in its nose would increase the gross weight close to or even beyond the 5 kg / 11 lb limit.
Fortunately, more up elevator throw (25° or even 30°) alone makes landings easier and better. Still they have to be done properly to be smooth and gentle (except really short landings, which just can't be gentle). Therefore I set up a dual-rate switch for 25° elevator and practiced, so now I'm able to do a gentle landing every time.
 This is my SrTM+ at the moment of touch-down. Flaps 45° down and elevator
25° up, the tailwheel touches down first and stabilizes the motion ahead
just before the main wheels touch down as well. That in turn lowers the wing's
angle-of-attack and holds the airplane on the ground.
This is my SrTM+ at the moment of touch-down. Flaps 45° down and elevator
25° up, the tailwheel touches down first and stabilizes the motion ahead
just before the main wheels touch down as well. That in turn lowers the wing's
angle-of-attack and holds the airplane on the ground.
On final approach, decent power was set to haul the airplane to the runway. At the end of a short flare to this tail-down attitude, power was cut for touch-down. The elevator stick was gently pulled in unison to compensate for the loss of propwash.
Alas, the picture is less than perfect. It's a small detail from a wide-angle photo that a friend shot with his smartphone (in August 2017).
My "theory" about the "porpoising" is the following: A fast and long wheel landing (at the two main wheels with the tail wheel still quite high) is the easiest way to land the SrTM+ as well as any other taildragger. A slow and short three-point landing (at all three wheels at once) is the hardest because it's hard to coordinate the flare so the airplane touches down exactly when it has the required speed and pitch attitude. Most times I miss this coincidence, or – the other way around – a perfect three-point is a coincidence for me.
If speed is still too high and the main wheels touch down first, the tail wheel forcedly touches down as well, making for a sudden increase of the wing's angle-of-attack (AoA). That in turn lets the airplane jump up again, after all it was still too fast for the higher AoA. Due to its quite "neutral" trim (aft C/G) even with flaps down, its now too-high pitch decreases only gradually. But the jump makes it slower so it lowers its nose after all and plops down on the main wheels again. This process recurs until the airplane's excess kinetic energy is dissipated. I think that's the "porpoising".
Anyway, since an exact three-point is hard to accomplish and touching down at the main wheels first is bad, I just aim at a "tail wheel landing" – at the tail wheel first. As mentioned above, that holds the airplane on the ground. It's easy to accomplish since only the tail-down attitude has to be set and nothing has to be coordinated. You may just wait for the complete touch-down and then cut power, or – for a really short landing – cut power immediately. In this case you have to coordinate power reduction and more up elevator to compensate for the loss of propwash. It's not that hard, though.
The SrTM+ shows a pronounced "porpoising" because it's trimmed just marginally stable and because it can get to very high AoAs even with flaps fully down. Hence, pitch changes are corrected slowly, and stall occurs when the tail wheel is substantially lower than the main wheels. Both are actually good characteristics, even if not necessarily for landing. But I make the best of it by doing those "tail wheel landings", and the SrTM+ is well-suited to them. I just dual-rate switch to more up elevator throw for really short cut-power landings. The model is sturdy enough to stand even hard landings. The stock tail landing gear was not, though, which is why it has been replaced by a better spring-linked one (see below).
Characteristics
In any case, SrTM+ is a gentle flyer with enjoyable characteristics. And even if landings have to be practiced to succeed, obviously (as evidenced by the videos and my own mishaps, see below) the model can take some less-than-perfect landings. So just never mind any porpoising and enjoy flying the model. Eventually you'll find the trick for smooth landings and all worry is forgotten anyway.
Just, or rather quite a few words about the flight characteristics:
- With its "neutral" setup and trim (which is perhaps common to all "V2" Telemaster versions), the SrTM+ has a wide speed range. A strong drive provided, it can fly fast without raising its nose and there is no tucking-under tendency either. So it's able to do more spectacular aerobatics than the traditional Telemaster versions. Besides, it's easier to fly in gusty winds.
- Then again, it has to be flown to the desired speed and attitude since it doesn't do it automatically. That holds especially for turns, which are hard to fly neatly because the required small amount of up elevator is virtually impossible to control by visual impression of the airplane's attitude.
- Therefore I sometimes wish the SrTM+ had a bit more dihedral (for easier circling in thermals) as well as decalage (for a stable trim resulting in a fixed slow cruise speed and climb or sink controlled by power setting). Especially when thermalling, I'm just missing the "good old" flight characteristics for even more relaxed flying after all, but that's just me. And there's a knack at least for thermalling:
- The SrTM+ is able to thermal, just not really good. But slightly drooped flaps and ailerons (5° or even 10°) for even more wing camber help thermalling a bit. At least they make the model a real floater with a stable trim.
- The SrTM+ can get quite fast if ailerons and flaps are a bit reflexed, like when flush with the wing root. In this case she needs substantial up elevator trim. With true flat-bottom airfoil (from leading to trailing edge), she flies beautifully and takeoffs and landings are easy.
- Flaps 20° down make the model slower and more stable (by more decalage) and takeoffs and landings even easier. The whole landing approach is easier, for that matter, as is dropping things from the Drop Box. It's easy to take aim and hit a spot on the ground, that is.
- Full flaps (45°) are special: A lot of drag lets the model sink like crazy so full flaps should be deployed only with some power set or you might have to recover with full power and suitable up elevator. (Only 35° would be less spectacular and easier to handle.)
- For a normal landing approach with full flaps, substantial power is needed and some down elevator to prevent pitching up to a near-stall attitude. A compensation mixer (flaps-elevator and maybe power-elevator in landing mode only) comes in handy. Landing is very slow and short.
- Drooping the ailerons by 15° with full flaps does not noticeably reduce aileron authority but does not noticeably increase lift either.
- Mixing some flap-down to a downgoing aileron helps rolling a bit, though it's in no case needed. It's noticeable only in wing-camber (thermalling) mode, anyway.
- Like any taildragger, SrTM+ takes off easier with a bit down elevator to lift the tail early during the take-off roll. Then again, it needs a bit up elevator to finally take off.
- During the take-off roll, when the tailwheel is off the ground, you have to work the rudder. It's well possible that right rudder is needed at first and then even left rudder. A rate gyro for the rudder (as yaw damper) would help.
- After touch-down, you have to work the rudder as well. Again like any taildragger, SrTM+ tends to swerve after a three-point and you might have to keep it in line with a lot of rudder and maybe even opposite aileron (crossed controls). The combi (aileron-to-rudder) mixer is not appropriate in this case. Again, a rudder rate-gyro would help, an aileron rate-gyro as well.
- All controls are quite effective, even without sealing any gaps. Slack-free linkages, precise radio control, and maybe even 40% exponential make for precise flying and smooth control around neutral.
- Rudder and elevator are especially (doubly) effective when blown by propwash. Since a lot of power is needed for full-flaps landings, rudder and elevator have to be worked carefully then. On approach, power-setting should be steady (no seesaw) to avoid the porpoising mentioned above. Flare is done with approach power setting. Then, for touch-down, both elevator and power stick are gently pulled back in unison.
- Avoiding seesaw throttle is all the more important if there is some time lag between moving the throttle stick and the corresponding shift of power. The here used ESC's soft motor run-up and braking is even softer the lower the power setting is. It's almost like flying with a turbine engine and needs getting used to.
- There's one trait that might surprise you: Like on any full-size airplane, the wheels spin quite a while after take-off and let the whole landing gear vibrate heavily. While full-size pilots stop that with the wheel brakes, we can't do anything about it. There's no problem either if all is secure, especially the wheels on their axles and the flight stabilizer in the fuselage.
For me, the Senior Telemaster Plus is very well suited. The model is very well behaved, flies slowly, and needs only a blanket for takeoff and landing. It has a nice paint scheme and is well visible in the air. It's even quite sturdy. In a word, it's appropriate to my age (of course to younger people as well, just kidding). The club mates drool over the slow flight as well as over the short take-offs and landings, they are sympathetic when a mishap occurs to me, and then they are amazed how little damage is done to the airplane – what more could you ask for? (Tongue in cheek.)
Stabilized Flying
My SrTM+ is now (2017) even equipped with a triple-axis gyro system acting as an electronic flight stabilizer (see below). Not that this model would need one – on the contrary, it's so well-behaved, calm, and steady that it's an ideal test-bed for such a device.
In lock mode, it's possible to lock the pitch attitude in a climb and the bank angle in a turn – but you have to work the elevator to keep the airplane's nose up in a turn, and the rudder to make it turn. It's just like you have to work the tail rotor in a turn of a helicopter with heading-lock gyro, and the pitch control if it's equipped with a flybarless stabilizer system.
Besides, the aircraft feels twitchier. That's because a control input means a rate of turning around one axis. Especially a small elevator input lets the model pitch up or down until the stick is released again. This behavior needs getting used to, to say the least, or is even counterintuitive. Anyway, I managed to let the airplane jump up and down like a crazy horse. That was immediately after take-off when I'm used to hold a climb attitude with elevator. I didn't realize that I had to let the flight stabilizer do this job now. However that may be, I decided not to fly in lock mode when taking off and landing.
Then again, damping mode feels like flying an even bigger model; flying in gusty wind as well as take-offs and landings are even easier than they are with the SrTM+ as it is. That's again appropriate to my age (again tongue in cheek). Still the airplane feels a bit "different" from flying without gyro effect because it tends to keep any attitude it was brought into by the pilot. The typical self-righting behavior of a Telemaster is weaker on a SrTM+, anyway, and it's now just as damped as any inadvertent airplane motion.
That makes no-gyro or damping a tie in thermalling. In the former mode, thermals are recognized by airplane motion and circling is easier due to the airplane's inherent stability. In turbulent air, it can be hard work to keep the model on track. In damping mode, thermals are recognized by variometer and the airplane is steady in turbulent air. Circling requires carefully working elevator and rudder (set to low-rate) to overlay the flight stabilizer. So I tend to use the damping mode when thermalling in turbulent air and the no-gyro mode in calm air.
A bad longitudinal or roll trim, or wing and stab not parallel, become blatantly obvious in both gyro modes, that is even more than in normal mode (no gyro effect). And by way of caution I must add that the flight stabilizer has to be safely fixed in the model. If it's only slightly loose it will cause the airplane to behave strangely and counterintuitively. This holds true even for a Senior Telemaster and for both gyro modes. Very likely, that will take the pilot entirely by surprise. Don't ask how I know.
Mounting and Dismounting
It may be a side aspect but yet interesting: How long does it take to put the model together for flying and how long to take it apart after flying? Well, I need at least 20 minutes for the former and 15 minutes for the latter – or rather 25 and 20 minutes.
Remember that the model has to be mounted bottom-up on a stand. The fuselage is put on the stand and the wing and stab joiner and shear tubes are put into the respective cardboard tubes in the fuselage – the right way round that is. Wings and stab halves are unbagged from their bubble-wrap envelopes and slid partly over the respective tubes. Servo leads and telemetry leads are plugged, and wings and stab halves are slid towards the fuselage while stowing the leads in the fuselage. The holes in the tubes are aligned with those in the wings and stab halves using a pricker. This is done on one side first to get the securing screws into them, then on the other side. That's the most tricky part of mounting and doesn't always go smoothly at the first go.
Now the landing gear is put into its notches in the fuselage bottom and the lift struts are put into their slots in the fuselage sides. The two straps over the rear strut are put on with their two Allen screws each, which hold the lift struts. The two straps over the landing gear's front strut with two screws each are put on as well and all strap screws are tightened. The lift struts are fixed on the wings with one screw each. These were 16 screws total (2 stab, 6 wings, 8 landing gear) and 8 connectors (2 stab, 4 wings, 2 telemetry).
The model is now taken from the stand and put on the ground – upright of course. The drive battery, with the receiver battery piggy-back on it, is inserted into the fuselage front and strapped. Its balancer connector is plugged into the telemetry cell voltage sensor and the drive battery is connected to the AntiFlash device, which is the master power switch as well.
The transmitter must be on at least now, with the right model selected, the no-gyro mode switched, and the motor cutoff active. The pitot-static tube under the right wing must have its cover on (after it had been briefly taken off for pressure equalization), and the model has to stand still. The receiver battery is plugged into the lead to the receiver's battery/data port. The front hatch is put on and secured with a piece of polyester adhesive tape lest it's blown off in fast flight.
Wait a minute (or two) until the WingStabi gyros are ready, the airspeed sensor is calibrated, and the GPS has found enough satellites. Meanwhile, the Souffleur voice-output device is switched on and checked if the right model is selected; then the earphone is put on.
In case the Drop Box is used, the model is now put back on the stand, again inverted. The Drop Box lid is unlocked by flipping the respective switch on the transmitter and then opened by hand. Candies are poured into the box, the lid is closed by hand and locked. The model is put on its wheels again.
Finally, the master switch is armed and the ESC tones are checked for proper recognition of cell count and voltage or charge, respectively. Check all controls and switchable mixers, check all telemetry values, reset timers, remove the pitot-static cover, and go fly.
You may imagine that the reverse procedure is less time-consuming; after all switching off, pulling the tape, removing the batteries, undoing the screws, unplugging the connectors, drawing off wings and stab halves, and taking out the joiner tubes is easy. Only putting wings and stab halves back into their envelopes is hard, especially if it's windy.
Modifications:
Repair
It was a silly mishap, my fault: The SrTM+ was rigged up, sat on the ground in the pit area pointing to me, and I was ready to check the controls. In some movement, my transmitter on the neckstrap turned with its upper side to my belly what advanced the throttle stick to about mid position. I tried to stop the model by blocking the spinner nut with my shoe but hit the propeller at its root. This strike let the motor mount bend and break to the right side, and made firewall and fuselage side partly go apart. (That was in April 2016.)
 First measure was setting up a motor-cutoff switch in the transmitter and
putting activating it on my checklist (Thr.-cut active in the display).
I should have done that before and not doing it was utterly stupid.
In fact, there was a cutoff switch already: the obround black pushbutton
below the three-way switch on the transmitter's left side. But by default
it was set up in a way that cutoff was active only as long as the button
was pressed. Now just that seemed useless for electric drives and I could
simply change it to a toggle behavior.
First measure was setting up a motor-cutoff switch in the transmitter and
putting activating it on my checklist (Thr.-cut active in the display).
I should have done that before and not doing it was utterly stupid.
In fact, there was a cutoff switch already: the obround black pushbutton
below the three-way switch on the transmitter's left side. But by default
it was set up in a way that cutoff was active only as long as the button
was pressed. Now just that seemed useless for electric drives and I could
simply change it to a toggle behavior.
Second measure was buying a neckstrap adaptor which brings the neckstrap's mounting eye over the transmitter's center of gravity. (It's for Spektrum but works with Multiplex as well.) That prevents the transmitter from turning and protects the sticks. Years ago, the transmitter had been converted from 35 MHz to 2.4 GHz and is now lacking the old long antenna as a counterbalance. (Consequently, the newer versions of this transmitter have two lugs for the neckstrap.) Still this was the first time things went awry.
 The motor mount backplate, which was bolted to the firewall, could not hold
the rest of the mount. I had suspected that this is the weak spot and had put
some super glue around the corners. But the glue had no grip in the plywood
and simply peeled off on one side or the other. Obviously, it couldn't get
into the wood grain. The laser-cut mounting tabs are strong enough to bear
the normal motor loads but can't withstand such abuse.
The motor mount backplate, which was bolted to the firewall, could not hold
the rest of the mount. I had suspected that this is the weak spot and had put
some super glue around the corners. But the glue had no grip in the plywood
and simply peeled off on one side or the other. Obviously, it couldn't get
into the wood grain. The laser-cut mounting tabs are strong enough to bear
the normal motor loads but can't withstand such abuse.
When I look at this mount with a lot of tabs and slots, the sides going through the firewall but being slotted for the horizontal frame inside the fuselage, and the firewall being slotted for these mount sides – well, that looks over-engineered to me. Or rather, the sides with the holes in them could have been meant for something that has been given up later (like the holes for control horns in both elevators).
Probably it was good luck that the motor mount broke. It absorbed a lot of the strike's energy and that way protected the fuselage structure, which else would have been damaged more severely.
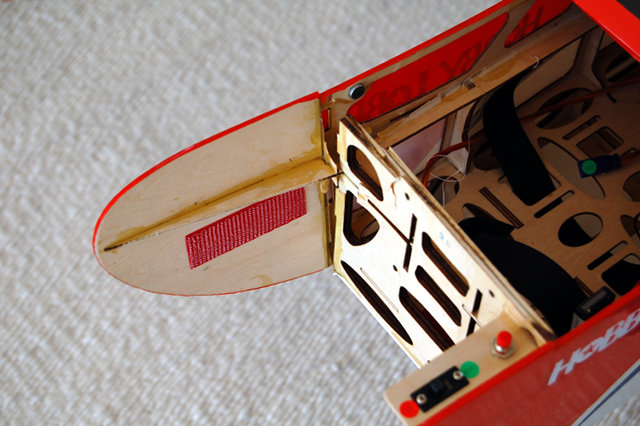 The firewall kinked and broke to the right of the mount, and it partly
delaminated. (It's made – doubled – from two equal plywood
parts.) The right "cheek" and part of the fuselage side behind
it went off the firewall. Looks like the firewall's mounting tabs in the
fuselage side parts were not properly glued.
The firewall kinked and broke to the right of the mount, and it partly
delaminated. (It's made – doubled – from two equal plywood
parts.) The right "cheek" and part of the fuselage side behind
it went off the firewall. Looks like the firewall's mounting tabs in the
fuselage side parts were not properly glued.
I couldn't make out if the glue didn't bond or if there was no glue at all. Anyway, the black edges of laser-cut parts should actually be sanded off to let the glue get into the wood grain, but of course that isn't done on ARFs. A clubmate calls that glueing ashes to ashes.
 The horizontal frame inside the fuselage broke (along the grain)
together with the firewall but separated from the right fuselage side.
Apart from the break, again the bondage problem on the mounting tabs.
The horizontal frame inside the fuselage broke (along the grain)
together with the firewall but separated from the right fuselage side.
Apart from the break, again the bondage problem on the mounting tabs.
Obviously, a lot of glue had been additionally applied in the corners after assembling and glueing (perhaps only tack-glueing) the fuselage. Looks like white wood glue, but in any case it bonded here just as bad as my super glue on the motor mount. The plywood surface seems like being impregnated with something that prevents proper bonding (like release wax in the press the plywood has been made in).
The good thing is that the cracks and delaminations stopped at the first former. With a bit twiddling all parts came back into place and could be glued with thin CA. The cracked wood bonded like crazy. The fuselage front now seems to be even stronger than before.
That was the easy part.
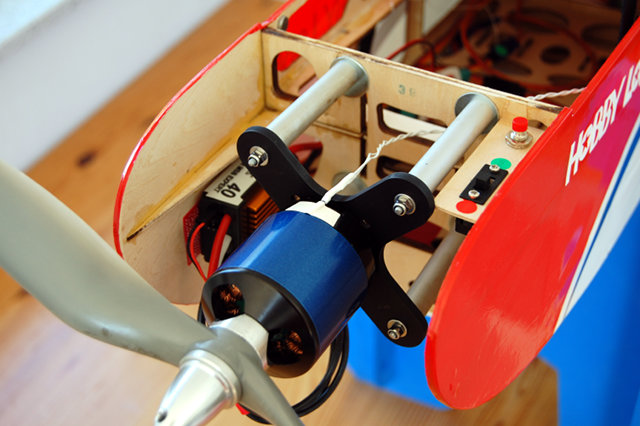 Making a new motor mount seemed to be hard at first. Fortunately, there
was an easy solution after some pondering and searching in the Web. It
turned out that Model Motors (AXi) has a big aluminum mounting backplate
(X-mount) for 53XX motors that also fits a 4130 motor, what the Alpha
AL50 actually is. No shop had it in stock, and not even Model Motors
specified any dimensions.
Making a new motor mount seemed to be hard at first. Fortunately, there
was an easy solution after some pondering and searching in the Web. It
turned out that Model Motors (AXi) has a big aluminum mounting backplate
(X-mount) for 53XX motors that also fits a 4130 motor, what the Alpha
AL50 actually is. No shop had it in stock, and not even Model Motors
specified any dimensions.
But it looked as if the outer holes would fit the holes in the firewall. So I gambled just ordering it directly in the Model Motors webshop. It arrived from the Czech Republic in three days, and as a matter of fact, it really fits! The mount's hole spacing is 1.5 mm bigger than the firewall's, but that is compensated by the big 4 mm hole diameter.
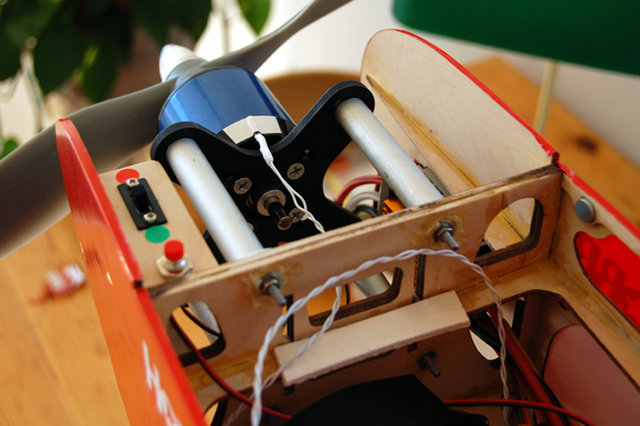 3 mm (M3) threaded rod fits the blind nuts in the firewall, so
four pieces were cut to 90 mm length (84 mm would do as well).
They were screwed into the blind nuts and locked with lock nuts inside
the fuselage.
3 mm (M3) threaded rod fits the blind nuts in the firewall, so
four pieces were cut to 90 mm length (84 mm would do as well).
They were screwed into the blind nuts and locked with lock nuts inside
the fuselage.
Large-diameter washers protect the firewall from being imprinted by the 64 mm spacer sleeves made from 12 mm diameter aluminum tube. Inside are small washers, held by nuts, which center the sleeves on the threaded rods. The mounting backplate is held by self-locking nuts on washers over the too big holes.
The horizontal frame which cracked behind the firewall has been reinforced (doubled) with a big piece of plywood. The whole firewall is now sturdier than before.
The mount weighs about 60g/2.1oz – not much more than the old one. It's very strong and rigid so another mishap of the same kind would probably cause fatal damage to the fuselage front. (That's what I thought, but it didn't, see below.)
There was some rubbing in the motor after the mishap, but thanks to the strong new mount I could just bend the rotor back to center so now it runs even better than before.
That was a close shave – I got off lightly in spite of my stupid mistakes. It helped that the original motor mount was not overly strong. But the damage done to the fuselage revealed things I had rather preferred not to see. On laser-cut interlocking-construction ARFs, glueing seems to be questionable.
Replacement
The MULTIcont MSB EXPERT 40 ESC worked very well but unfortunately not consistently. There were some inexplicable breaks, nothing serious, just short drops in drive power as well as telemetry transmission. I didn't worry until some day (in early October 2016) the motor stopped working in flight. It wasn't just a motor cutoff, the whole ESC quit working, including telemetry. Fortunately, the BEC was still intact. As it happened, I was demonstrating slow flight over the runway so the dead-stick landing was easy. Actually, the good SrTM+ just sat down on its own. Again I got off lightly, but now I lost faith in the ESC and wanted to replace it. Multiplex had discontinued it, anyway, presumably due to still unresolved technical problems.
 Now they have the – presumably reliable – ROXXY series of ESCs
for 45, 70, and 100 A continuous current. The 45 would have replaced
the old 40 quite well, the 100 would be far too big. I chose the ROXXY Smart
Control 70 - MSB to have some oversize. That should keep the ESC cooler
during my long flights at partial (cruise) power. Still this new ESC is
even smaller, lighter and more efficient than the old one – not much,
but a bit. And it can cope with up to 6 LiPo cells, not only 4. It has
virtually the same telemetry functions and rather similar setup options.
Now they have the – presumably reliable – ROXXY series of ESCs
for 45, 70, and 100 A continuous current. The 45 would have replaced
the old 40 quite well, the 100 would be far too big. I chose the ROXXY Smart
Control 70 - MSB to have some oversize. That should keep the ESC cooler
during my long flights at partial (cruise) power. Still this new ESC is
even smaller, lighter and more efficient than the old one – not much,
but a bit. And it can cope with up to 6 LiPo cells, not only 4. It has
virtually the same telemetry functions and rather similar setup options.
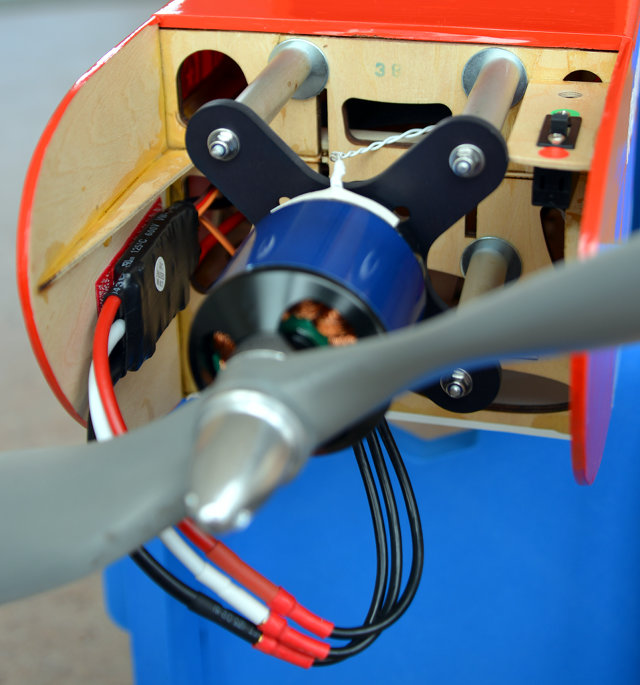 It always reacts when battery voltage gets low, the only choice is
power reduction or cutoff. While the cut-off voltage is adjustable
for cell types other than LiPo, it's unchangeably set to 3.2 V per LiPo
cell. That's fine for cutoff, but 3.3 V at least would be better for
power-reduction (see next section). I even wish for an option to deactivate
this whole feature. That would allow to sacrifice the battery and save the
model. Telemetry would make for enough warnings prior to this last resort.
It always reacts when battery voltage gets low, the only choice is
power reduction or cutoff. While the cut-off voltage is adjustable
for cell types other than LiPo, it's unchangeably set to 3.2 V per LiPo
cell. That's fine for cutoff, but 3.3 V at least would be better for
power-reduction (see next section). I even wish for an option to deactivate
this whole feature. That would allow to sacrifice the battery and save the
model. Telemetry would make for enough warnings prior to this last resort.
It even automatically recognizes a freshly loaded LiPo battery, including its cell count, by an (adjustable) cell voltage threshold (4.1 V by default). There's no red pushbutton and the need to push it after inserting a freshly loaded battery.
It knows only two cell types, LiPo and NiMH. The latter actually means cell types other than LiPo, so LiFePO4 could be used as well, just not automatically recognized and hence not quite as convenient. The charge count would have to be reset manually by connecting the battery with the power stick at full, and then reconnecting (or simply re-arming) it with the power stick at idle.
Now I could use a 5-cell battery to have really decent power as well as more flight time. A 4-cell and a 5-cell battery could be used in turn and would be even automatically recognized by the ESC. They just must be fully charged and have the same capacity (which has to be specified in the telemetry setup).
Motor timing can be set to any fixed value, but I adopted the default 15° (for the 14-pole motor). This ESC has not only a soft motor runup function like the old one. It has five increments of runup speed as well as five increments of runup torque and four increments of breaking power. Here is all set to "normal", meaning medium values.
See here for an investigation of the incident mentioned in the next section, using recorded telemetry data. There, the third (small detail) diagram shows examples of "soft" motor run-up and braking. The first hump in the red amperage line shows a yet reasonably fast run-up and braking to or from full power, respectively. The next one is to or from only half power, respectively, and now both run-up and braking are just as fast but correspondingly softer (not as steep). The last hump is an example of low-voltage power reduction where voltage (magenta line) is kept up at 12.8 V (3.2 V per cell) by continuously reducing amperage (red line). All worked like a charm.
Yet it is worth mentioning that "runup speed" is obviously meant as runup in a certain time, which is adjustable by parameter (in five increments). I'm not absolutely sure, but it would at least explain why I feel that runup is really slow when I advance the throttle stick only slightly during landing approach. Finally I got used to it (and it needs getting used to) but if there would be a choice I would probably rather prefer a constant runup rate over a constant runup time. Seems I should go deeper into the "runup torque" parameter.
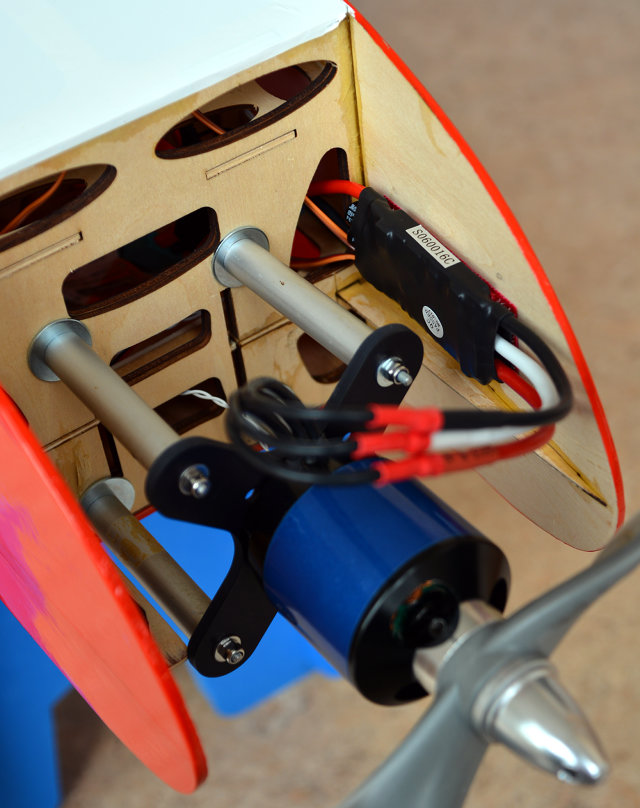 There's no plastic case and no heat sink, just shrink tube, and this ESC is
about half an ounce lighter than the old one. The motor cables are longer but
still hang down freely without rubbing.
There's no plastic case and no heat sink, just shrink tube, and this ESC is
about half an ounce lighter than the old one. The motor cables are longer but
still hang down freely without rubbing.
The AntiFlash device, recommended in case more than three LiPo cells are used, is already at hand. The big capacitor included in the set is meant to smoothen servo voltage in case of varying current loads and backflow currents. The PeakFilter on hand should do the trick even better because it's even bigger.
S-BEC voltage is adjustable between 5.0 V and 8.0 V. Unfortunately, it's not properly stabilized. Set to 6.1 V, it actually varied between 6.0 V and 5.8 V with short drops to 5.7 V. My old version-1 GPS might be affected so I finally set 6.4 V to keep actual voltage at or above 6.0 V. (Don't laugh, the voltage drop could simply come from the thin lead to the receiver, see next paragraph.)
BEC current can be 3 A continuous and 10 A maximum – very good. But the servo and sensor-bus leads are quite thin. That is OK with the bus lead that has no plus core, anyway (the ESC'S telemetry powered by the drive battery). That would be OK with the servo lead if it were not the BEC lead as well. 10 A bursts could make for quite a voltage drop. Fortunately, the lead is not too long, the extension lead to the receiver is thicker, and the servos are not really power-hungry. Still there were some problems (see below).
Beyond voltage drops or as their result, the battery recognition failed at least once and the ESC's own telemetry failed several times. It showed nonsense values (like huge negative rpm) after runup and sometimes even again after re-start. Strangely enough and for whatever reason, these problems vanished after the BEC had been disconnected and replaced by a receiver battery. Therefore, and considering the well-known advantages, I recommend doing that in the first place and forgo the BEC.
By the way, several modelers reported similar problems in the Multiplex forum and finally these ESCs were discontinued. There are still ESCs with Multiplex sensor bus interface by YGE, Kontronik, and IBEX.
The cables go easily through one of the lightening holes in the firewall. This picture shows how holey it is. Sealing the "unused" holes would be possible, but even one small unsealed hole, for instance a cable gland, would make for the same ram air pressure in the fuselage. An air outlet hole (twice as big as the "leak") would be needed to reduce this pressure, which otherwise can blow off the front hatch. (Don't ask how I know.) A bit heat removal for the battery is even desirable, so I'd leave at least one of the firewall holes open.
Like the GPS, this new ESC has only one single connector to the sensor bus. That's why the sensor bus wiring had to be changed eventually. Now there is a Y-cable, namely from the receiver (bus master) to the nearby GPS as the rearmost bus member, and via an extension lead to the temperature sensor box in the front fuselage. From there the bus extends to the FlightRecorder and to the ESC as the foremost bus member. All quite consequential...
Fixing
Another silly mishap (in mid-October 2016), again my fault: I was doing practice traffic patterns and missed or ignored the telemetry's battery low-charge warning (the voice output). Maybe it was blocked by several low-voltage warnings during every take-off and climb, or it cluttered the voice output beyond recognition because it was set to permanent. Anyway, during the the 23rd take-off, the new ESC's low-voltage power reduction set in and eventually the SrTM+ touched a bush top. It tumbled earthwards and bumped on its main landing gear, which got crooked. No other damage – obviously this ARF is quite sturdy.
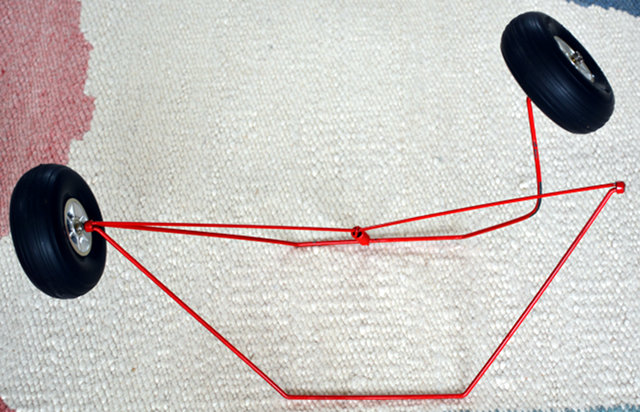 The airplane bounced in a sideward motion onto the right wheel. The main
strut, which is the rear one with the wheel and the bungee attached to it,
broke the clamp that holds the two struts and the bungee together, and was
seriously distorted. That must have absorbed most of the impact's energy
and protected the airframe.
The airplane bounced in a sideward motion onto the right wheel. The main
strut, which is the rear one with the wheel and the bungee attached to it,
broke the clamp that holds the two struts and the bungee together, and was
seriously distorted. That must have absorbed most of the impact's energy
and protected the airframe.
The fore strut and the bungee as well as the wheel stub shaft have not been distorted and not even bent in the kinks. On the left-hand side, both struts as well as the stub shaft got bent but not distorted. They were still straight and only bent in the kinks presumably due to the impact's vertical component and the here "outward" component.
The wheels have not been damaged and are completely OK.
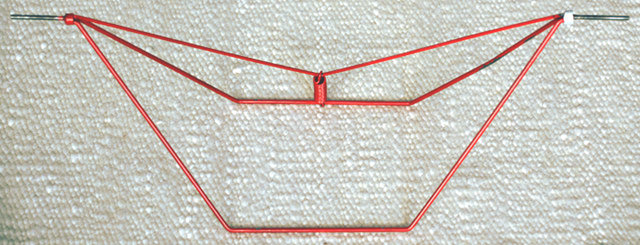 The distorted strut could be straightened fairly well. It could use some
red enamel to mend the paint defects.
The broken clamp got a jacket made from a short piece of aluminum tube.
It was pressed on and additionally the clamp and the struts were secured
with CA glue.
The distorted strut could be straightened fairly well. It could use some
red enamel to mend the paint defects.
The broken clamp got a jacket made from a short piece of aluminum tube.
It was pressed on and additionally the clamp and the struts were secured
with CA glue.
The left struts and stub shaft were roughly bent back to the original angles. Aligning the wheel axles turned out to be really hard, maybe because there are no right angles. Now the wheels are not exactly vertical but at least there's some rake outward (and not inward), and they are not exactly parallel but there's at least some toe-in (and no toe-out).
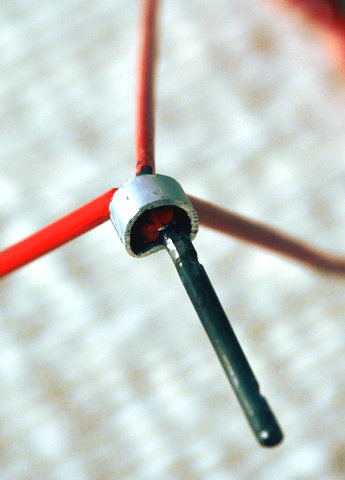 Anyway, the landing gear is now still good enough for all practical
purposes.
Anyway, the landing gear is now still good enough for all practical
purposes.
This is a close-up of the repaired clamp and the stub shaft or wheel axle. There are two notches neatly grinded into it. They are meant for the set collars' set screws in case the wheels included in the ARF are used. Since wider Graupner wheels are used here, the set screws are not screwed into the notches. Instead, they sit on the axle's round part and have to be really tightened lest they slip off the axle.
Just that happened (in late October 2016) when the landing gear had been repaired. Just after the tenth take-off, the right wheel slipped off and fell into the ditch behind the runway. Fortunately, there was an 8 mph headwind so with full flaps and some power the touch-down speed was quite low and the "one-wheel landing" succeded with only a 90° turn and without damaging the airplane. (Again, this speaks for this ARF's sturdiness.)
Like on any full-size airplane, the wheels spin quite a while after take-off and the whole landing gear vibrates heavily. I don't think the set screw loosened (it was secured with locking varnish), but probably it was not tight enough so the wheel pushed the set collar from the axle and then followed.
This was the first time that happend so I just tightened the set screw (of a new set collar) even more and again applied locking varnish, hoping that this is safe again as it was before the landing gear was damaged. On second thought, I decided it's not worth it to take the chance that it happens again and grinded new notches into each axle so the set screws can't slip off, at least if they don't come loose completely.
Once again I got off lightly. To help prevent a recurrence, the telemetry low-voltage warning level has been set lower so a warning is notified only when the battery charge is really low. Now it should come after a single low-charge warning and not instead of or intermingled with it. I hope not to miss any warning this way (see below).
The warning level has been set only a bit lower, though, because the battery has been flawed in the incident (see here for an investigation) and lost capacity thereby. When the ESC's power reduction finally set in, average cell voltage was only 3.175 V and shortly dropped to 3.15 V. After half a minute without load it recovered to only 3.325 V. It should not go below 3.2 V loaded and 3.75 V idle, so that was bad. Since then, the battery pack has swollen up. It's still serviceable but flight times are a few minutes shorter now. So much about LiPo battery ruggedness (and the new ESC's automatic power reduction)…
Retrofit
So there were some impairments for my SrTM+ in the 2016 flying season,
which was eventful in an inconvenient way, and there were two unresolved
problems left after its closing:
(1) The rudder seemed floppy even if still effective enough, and the tail
landing gear was loose in its swiveling axis so steering had to be done
with rudder and propwash, and was difficult.
(2) The elevator servo had to be got going again every time the model was
started up, even though it had always worked during flights.
Hence the model was subjected to a thorough inspection in January 2017,
which revealed that both problems were serious and led to a twofold
major retrofit of the model's tail.
Tail Landing Gear
As to the first problem, the winter inspection revealed another damage possibly originating from the accident described in the section before. It's related to the landing gear as well, but now that on the tail. And it's not only the landing gear that is damaged but also the rudder. In the section Hardware (above), I had mentioned that the tail landing gear passes bending (side) forces to the rudder. It's well possible that in the accident, the tailwheel hit the ground in a sideways motion. In the following landing with one wheel only, the tail landing gear has been laterally stressed by all means. Then again, the rudder could have been damaged before since the tail landing gear swiveling axis was never in line with the rudder hinge axis but slightly behind it. Besides, the tail landing gear was loose on the steering shaft so no proper steering on the ground was possible.
 Here you can virtually see that the rudder is broken inside. Actually,
there is a front spar running from top to bottom, which has to turn the
rudder and bear the torque applied by the control horn. You see its bolt
head and bulging disk at the rudder's lower end.
Here you can virtually see that the rudder is broken inside. Actually,
there is a front spar running from top to bottom, which has to turn the
rudder and bear the torque applied by the control horn. You see its bolt
head and bulging disk at the rudder's lower end.
Now there's a gap in the rudder's front spar, for the elevator joiner. I even had to shape a cutout in the fuselage's rear tip to make room for the quite thick joiner I had made as replacement for the broken stock joiner. Anyway, the gap is bridged by a triangular piece of plywood set into the rudder's lower front corner, faintly seen through the covering.
The glue joint between this piece and the front spar's upper part had come loose, be it by a hard sideways strike or by repeated torsional strikes from the drag-lever type landing gear.
 The broken glue joint could be simply mended with lots of CA, the
remaining wrinkles in the covering were ironed out. Now the rudder
was again rigid enough to bear the torsional forces from the
control horn.
The broken glue joint could be simply mended with lots of CA, the
remaining wrinkles in the covering were ironed out. Now the rudder
was again rigid enough to bear the torsional forces from the
control horn.
You see that a hinge is above the cutout, where a "rib" is in the rudder. There is no hinge supporting the rudder where the control horn is and where it's now badly needed. The tail landing gear's swiveling shaft is there instead, and it was held or guided by the hole in the aluminum plate under the fuselage tip, actually making for a hinge.
Unfortunately, the shaft is not in line with the rudder hinge line but a bit more aft, as seen in the picture. That must have made for some stress in the rudder, which eventually broke for this reason or the other. Either way, the shaft is the actual cause of the problem considered here so it just had to be cut off. That was possible only after the rudder had been made rigid again.
It was my fault not to mind alignment. I could have glued a strip of wood under (or behind) the shaft so that its center would be exactly under the hinge pins. A groove would have had to be made in the fuselage tip to make room for the shaft. Or the hinges could have been stuck deeper (more aft) into the rudder so their pins were exactly above and in line with the shaft. Either way though, it wouldn't have been a perfect or at least good solution.
Now it's too late for a proper solution after all because the piece of the shaft that is glued in will stay in the rudder and is in the way of an additional hinge. So far I didn't see any way to add one close to the control horn that could bear the loads resulting from the one-sided servo linkage and the both-sided tail landing gear links. I was just hoping that the rudder is strong and rigid enough or that I'd still have an idea how to add a hinge.
 Above I had said that the tail landing gear is a tricky design and
I wish it were different. Silly me – I should have taken that
seriously and replaced the landing gear in the first place. Now I just
had to because the swiveling shaft had to be cut off the rudder.
Above I had said that the tail landing gear is a tricky design and
I wish it were different. Silly me – I should have taken that
seriously and replaced the landing gear in the first place. Now I just
had to because the swiveling shaft had to be cut off the rudder.
Actually I wanted a metal gear, but that was not available so it's a plastic gear now. At least it's lightweight and I think it will be strong enough even though the mounting is not ideal. And it is accurately made and has no slackness like the stock gear had in abundance.
There's only one way to fasten a new gear: with two screws into the blind nuts in the fuselage's bottom. A new hole had to be drilled in the gear but again I think that won't weaken it too much. For a better seat, I left the red-anodized aluminum plate in place.
The tail wheel steering is accomplished by two springs connected to a two-sided rudder control horn. Side forces make for bending forces in the fuselage, which is hopefully strong enough. They also make for forces on the horn and the rudder, but these are limited by the springs. When the tailwheel is turned by hand, the rudder warps a bit but still seems to be strong enough, so this solution should be OK.
One of the stock wing control horns had been re-used on the rudder before (see section Improvement above). Now parts from another one have been used to make it a two-sided horn whose "backbone" is a piece of 3mm threaded rod. There is one lug on the left side for the linkage and one lug each on both sides for the landing gear springs.
The rudder servo had to be moved to the former place of the elevator servo, which had to be replaced (see next section). Now it's more forward on the left fuselage side. The good stock pushrod used for the elevator linkage was now definitely too short, so a longer one was cut from 3mm threaded rod. The servo lead extension that had been soldered on was cut off and a new servo plug was crimped to the remaining lead, to be plugged into the new cable harness (see the section after next).
Elevator Servo
As to the second problem mentioned above, the winter inspection revealed a damage which was not originating from any accident. Fortunately during the tests in the workshop, the elevator servo finally busted. It had been bad from the outset in that it stuck every time the model was started up. It needed a couple of minutes of continuous up-and-down action to become free and operative. It looked like the potentiometer being oxidized making for bad contact, and needing some movement to break through the oxide layer and regain good contact.
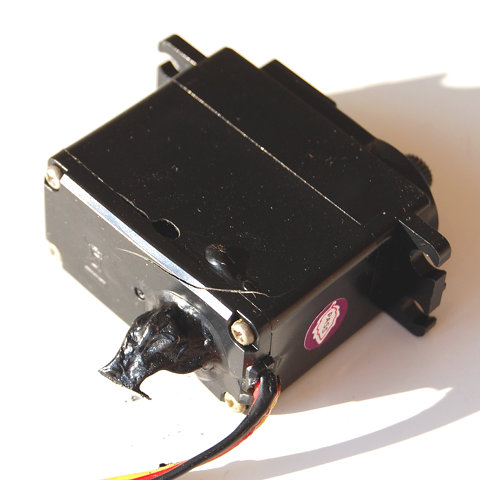 At least it seems to be true that the potentiometer was the problem's
core. The servo case virtually burst beneath the place where the
potentiometer sits. There must have been a lot of heat that let the
plastic melt, and some pressure inside the case that let it bulge on
both sides and finally burst on the bottom. There's even a crack through
the case's body and its bottom cap.
At least it seems to be true that the potentiometer was the problem's
core. The servo case virtually burst beneath the place where the
potentiometer sits. There must have been a lot of heat that let the
plastic melt, and some pressure inside the case that let it bulge on
both sides and finally burst on the bottom. There's even a crack through
the case's body and its bottom cap.
I supposed the heat came from too much amperage due to too little resistance in the potentiometer (maybe a short circuit), and the pressure from smoke caused by burning plastic or whatever (you know, that notorious Magic Smoke). But then again, there is no other damage caused by too much amperage even though there would have to be some in that case. And I thought this kind of damage is unique, but the hobby shop had another servo with the same damage symptoms.
So anyway, I'm at a loss but that doesn't matter. I'm glad that it happened in the workshop and I got off lightly again. I just took advantage of the situation and got rid of the clumsy elevator solution. Each stabilizer half should have its own elevator servo so the stabilizer can be really mounted and dismounted simply by plugging, without dismantling the linkage and the joiner.
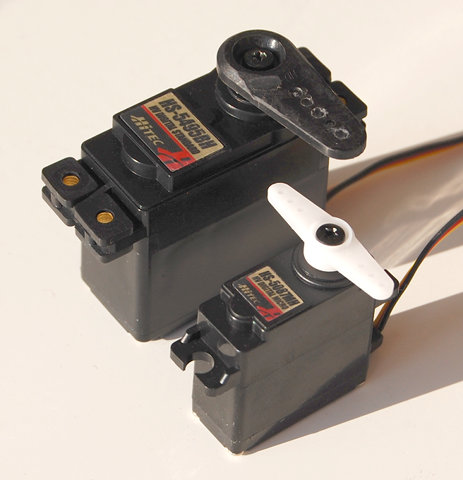 Left is the rudder servo, which is perfectly good like all four wing
servos and is shown here as a substitute for the busted elevator servo.
These are budget-priced HS-5495BH digital high-voltage "standard"
servos giving 89 oz·in (63 N·cm) torque at 6V.
They have one ball bearing and a Karbonite gear and weigh
1.59 oz (45 g).
Left is the rudder servo, which is perfectly good like all four wing
servos and is shown here as a substitute for the busted elevator servo.
These are budget-priced HS-5495BH digital high-voltage "standard"
servos giving 89 oz·in (63 N·cm) torque at 6V.
They have one ball bearing and a Karbonite gear and weigh
1.59 oz (45 g).
Right is one of the two new elevator servos, one for each elevator half. These are premium (priced) HS-5087MH digital high-voltage "micro" servos giving 50 oz·in (36 N·cm) torque at 6V. They have one ball bearing as well but a metal gear and weigh only 0.77 oz (22 g).
So the two micro servos combined have more torque than the single standard servo and weigh less – even if at nearly four times the price. But that is worth it to me because the fuselage is now far easier to stow in my car and that is what the detachable stabilizer was actually meant for.
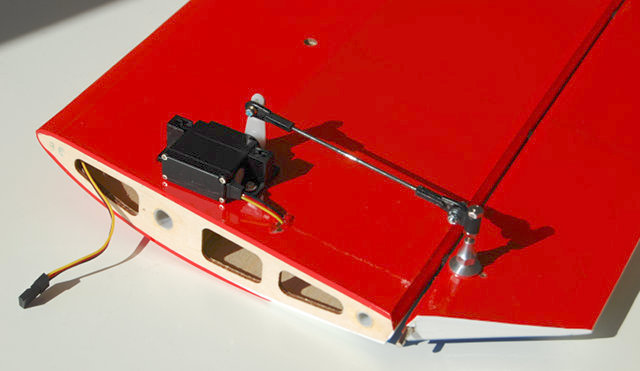 This is the left stabilizer half ready for use. The pin for the elevator
joiner could be cut since it protudes a bit what may bother when stowing
the stabilizer away. But the whole linkage is protruding so much that the
pin is neglectable and just as well can be left there.
This is the left stabilizer half ready for use. The pin for the elevator
joiner could be cut since it protudes a bit what may bother when stowing
the stabilizer away. But the whole linkage is protruding so much that the
pin is neglectable and just as well can be left there.
The stab half is slipped on two aluminum joiner tubes, the servo is plugged into the harness in the fuselage, the stab is pushed to the fuselage side and secured with an Allen screw. You can see the sleeves for the joiner tubes and the hole for the screw.
One of the stock wing control horns has been re-used here, which are actually good and have suitable length in this case. This servo arm is shorter than the standard arm, and smaller ball links and only 2mm threaded rod have been used for this linkage. (The included arm was even shorter, see previous picture, but was replaced by one that had been left over from a bigger mini servo.)
At first I intended to mount the servo sunk-in, what would be possible in the rear part of the sheeting behind the main spar. But the linkage would be rather short and not good geometrically. And putting the servo into the front sheeting would weaken the D-tube too much. So I had to refrain from any sunk-in mount.
In the end I glued two pieces of 2mm plywood under the sheeting, one in front of the main spar and one behind it. Using the plastic clamps which came with the servo, it was screwed flat on the reinforced sheeting with four small wood screws. The forces from the torquey servo are led directly to the main spar, what gives a very strong and rigid solution.
Admittedly, it's a crude solution, even if mechanically advantageous. But it's virtually invisible once the model is rigged up, and it works very well. Next task would have been assigning a channel to the second elevator servo and setting up both servos for equal throw in the transmitter. Channel 9 would have had to be used, which had been assigned to the Drop Box before. But I did it differently after all by relocating the setup into the new WingStabi gyro stabilizer in the model – my next project (see below).
Tail Assembly
Prior to that, a new cable harness had to be made for the tail servos, now three of them. I cut a 32" piece from the twisted three-core cable and removed the thick orange (signal) core. Instead, three thin yellow (signal) cores were twisted around the thick brown (ground) and red (plus) cores and all were secured with several small pieces of black shrink tube (left side in the picture).
 Six short pieces of servo lead were bought, three with servo plugs
(right side in the picture) and three with matching sockets. The
latter were crimped to the twisted cable on the tail/servo end, the
former on the receiver end (connection shown in this picture).
Six short pieces of servo lead were bought, three with servo plugs
(right side in the picture) and three with matching sockets. The
latter were crimped to the twisted cable on the tail/servo end, the
former on the receiver end (connection shown in this picture).
The red and brown cores, respectively, were crimped together at each end so that all three servos use common plus and ground cores. Only the yellow signal cores have to be separate. Bigger or smaller core end sleeves, respectively, have been used to crimp the cores together. Finally they have been insulated with shrink tube (middle of the picture, of course).
I had contemplated making a plug-in solution for the servo leads and had even bought expensive Multiplex servo plugs and sockets for that. But then I shrank from it after I had seen how simple and good it is to just plug the stock servo leads into the harness in the fuselage. The sockets are tethered with thin yarn so they can be pulled out of the fuselage for plugging. Then again, the yarn holds the harness when it's about to slip forward in the fuselage. For even more safety, securing clips over plug and socket may be used.
On the other hand, it's difficult to glue plugs and sockets into stab and fuselage, respectively, that is to make them strong enough and keep them aligned. Because the fuselage is tapering towards the tail, the inner stab sides are not perpendicular to the joiner tube sleeves. The only way would be glueing plywood pieces to the vertical edges in the rib cutouts behind the main spar. But glue would be sucked up like crazy by the wood so a secure bond is not guaranteed, and the thin ribs might break under the sideward load of plugging.
If and when a better solution would be found, it could be done any time without problems. And I can live with plugging the leads on the flying field, or I would just find a better solution.
 Looking good! Maybe a bit over-engineered, or crude, or even messy,
but that is a consequence of this solution being a retrofit. I still
think a pull-pull linkage for the rudder (and a tail landing gear like
this one) as well as elevator joiner pins plugged into a fixed central
control horn (like for all-flying stabilizers) would be a simpler
and better solution. But that would have had to be incorporated
into the design in the first place. This retrofit is even good
given the circumstances, and quite acceptable.
Looking good! Maybe a bit over-engineered, or crude, or even messy,
but that is a consequence of this solution being a retrofit. I still
think a pull-pull linkage for the rudder (and a tail landing gear like
this one) as well as elevator joiner pins plugged into a fixed central
control horn (like for all-flying stabilizers) would be a simpler
and better solution. But that would have had to be incorporated
into the design in the first place. This retrofit is even good
given the circumstances, and quite acceptable.
By the way, if you think that the two elevator control horns are not parallel – you are right. Both elevators are just so warped that this is needed to have the better part of them aligned. It's even better than before because the joiner and the pins had a fixed, non-adjustable position that was not quite as good as now. And I just didn't manage to straighten the elevator halves with the covering iron, that is without re-covering them completely.
You see why the rudder servo had to be relocated to the other fuselage side where it sits quite a bit more forward, out of the way of the new elevator servos. The now unused, former rudder servo tray was good to thread the new cable harness in, but it could be covered with a piece of white covering film now. However, I let it open to see if it is useful as a cooling air outlet. (It turned out to be, it's good for the battery.)
All linkages can move freely and independently, with one exception: When the elevator is fully down, the rudder control horn tips will rub against the elevator's bottom side at more than 20° rudder throw. That's not a problem, though, since the covering, the whole elevator, and even the whole stabilizer will just draw aside elastically.
That's good to know because such a situation can happen by all means: In the early take-off run, down elevator is advisable to lift the tail and get the wing out of the stalled condition. At the same time, a lot of rudder throw may be necessary to keep the airplane straight on the runway. This job will be assigned to the new WingStabi gyro stabilizer (see next section), which won't watch elevator deflection when throwing full rudder.
Then again, this discussion could be pointless because full throw won't be necessary due to the propwash, neither elevator nor rudder. What is important, though, is that all linkages are adjusted mechanically with the servos in their neutral position. That makes it easier (or even possible in the first place) to set up throws and mixers in the WingStabi instead of the transmitter.
There is one disadvantage to consider: The whole tail is a bit heavier than before (mind the longer tail landing gear, the bigger rudder horn, the second elevator horn and linkage, the servo clamps, and the plywood reinforcements), and the two new servos are a bit more aft than the old one was. That is by far not compensated by the slightly lighter servo cable harness. The airplane's balance point is now again close to its rear limit.
Upgrade
In 2016, Multiplex had brought out some interesting new items I couldn't resist. After all, especially the SrTM+ is a technical toy for me and I just have to try out everything new that is usable in it. There is a triple-axis flight stabilizer with three gyros and combined with a receiver in one case. And there are two new telemetry sensors, which are favorable to the ESC's voltage sensor and to the GPS speed display, respectively. These are not really innovations, but just new from Multiplex and hence usable for me with the rest of my Multiplex equipment. Since a major retrofit (see previous chapter) had to be done, anyway, I took the opportunity and upgraded receiver and telemetry for the 2017 flying season. Last but not least, I had the defective telemetry display (a transmitter accessory) replaced by a new one to make even better use of the whole telemetry system. Then, after some inexplicable problems with non-working telemetry sensors, I made a – successful – attempt to solve them by using a receiver battery instead of the S-BEC in the ESC. That was only in August 2018.
Flight Stabilizer
Of course, the SrTM+ – like any Telemaster – doesn't need such a thing; it isn't even a desirable upgrade because this airplane is so big and well-behaved. But just that makes it an ideal test bed to explore the possibilities of damping or locking it's movements or attitude, respectively, and to practice flying in these modes.
Multiplex calls the WingStabi a "triple-axis gyro system for fixed-wing model aircraft". So actually, it is more than a wing stabilizer since it has three gyros to stabilize not only the roll axis (wing) but also the pitch and yaw axes. That's why I call it a flight stabilizer, in lack of a better term. It's available as a separate device or in combination with a receiver, what I find logical so it has been chosen here. (The "old" receiver – left in the picture – is re-used in my HIROBO Schweizer 300 since Multiplex doesn't have any receiver-stabilizer combo for helicopters.)
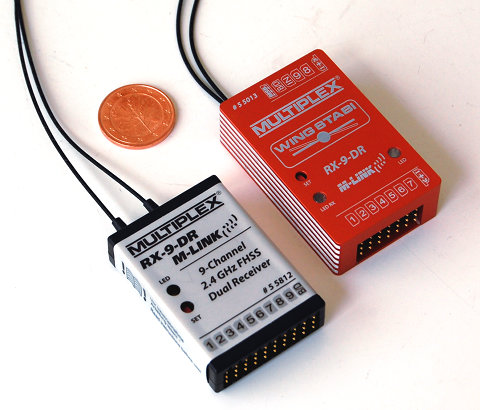 The WingStabi flight stabilizer including receiver is only a bit bigger
and heavier (1.13oz/32g) than the receiver alone (0.63oz/18g). It adds
three gyros to the same dual receiver, which is able to handle up to 16
channels here (see below why).
And it has a more powerful processor, which may be the reason why it has
a metal case for better heat dissipation.
The WingStabi flight stabilizer including receiver is only a bit bigger
and heavier (1.13oz/32g) than the receiver alone (0.63oz/18g). It adds
three gyros to the same dual receiver, which is able to handle up to 16
channels here (see below why).
And it has a more powerful processor, which may be the reason why it has
a metal case for better heat dissipation.
It's intended to sense inadvertent rotations around the roll, pitch, and yaw axes and stop or at least dampen them by appropriate aileron, elevator, or rudder throw, respectively. To this end, it has to be mounted with its edges parallel to the three airplane axes and not aslant. Orientation (what is front/rear, top/bottom, left/right) is arbitrary since it is set by parameter in the WingStabi setup (see below).
It should be hard-mounted, without any soft pads. Even a Velcro tape is so loose that it may fool the gyros when vibrations occur (say the instructions).
 The new device could be mounted on the plywood tray that had been glued
in for the old receiver, but the Velcro had to be removed and a wedge
(made from hard foam) inserted. Both were secured with strips of two-sided
adhesive tape and additionally two zip ties around both and the tray.
The new device could be mounted on the plywood tray that had been glued
in for the old receiver, but the Velcro had to be removed and a wedge
(made from hard foam) inserted. Both were secured with strips of two-sided
adhesive tape and additionally two zip ties around both and the tray.
To make allowance for some angle-of-attack, the wedge angle had to be even 17 degrees. After all, the device sits under the wing airfoil's top, which is sloping towards the trailing edge (left in the picture). Now the WingStabi should be exactly horizontal in slow cruise flight.
The Drop Box still fits. It has two protruding pieces of stock, one of which looked like it would have to be cut off. But actually it runs beside of the WingStabi. These pieces of stock seem to have no function anyway.
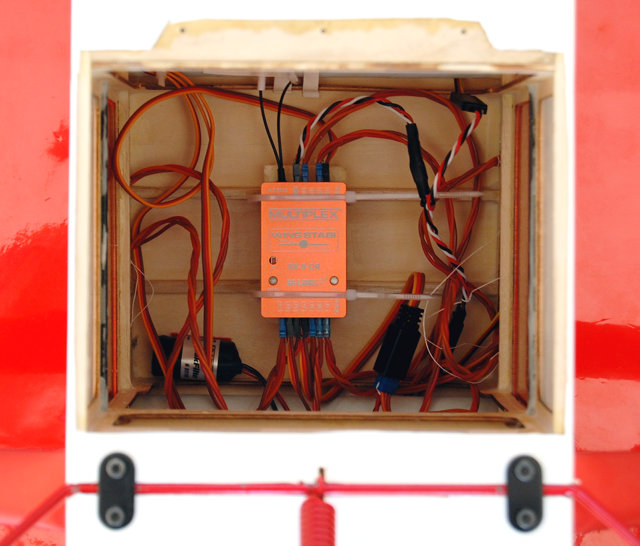 The WingStabi sitting under the fuselage "ceiling", seen
through the bottom hole. Top in the picture is aft, bottom is fore;
right in the picture is the right wing's, left the left wing's bottom
side.
The WingStabi sitting under the fuselage "ceiling", seen
through the bottom hole. Top in the picture is aft, bottom is fore;
right in the picture is the right wing's, left the left wing's bottom
side.
All leads were plugged as before, except in servo port 8. It had been used for the PeakFilter but is now needed for the second elevator servo. I chose to put a Y-cable into port 4 and plug the ESC/BEC and the PeakFilter into it.
Again, the battery/data port can be used for an extension lead that runs to the fuselage front. It is used to connect a computer with a special USB interface cable and set up all parameters, including the servo positions in the first place, while the model is completely rigged up.
To this end, not even a drive battery should be needed but only a receiver battery connected with a Y-cable. However – every time I do that the AntiFlash plugged to the ESC begins to roast and produces plenty of Magic Smoke. I hope the new AntiFlash version will abstain from that.
The WingStabi's mounting may look like making assurance doubly sure, but it was far from that. The adhesive tape adheres very well to the device's case and even to the wooden tray, but not to the foam wedge. Besides, the zip ties are slippery and can slip off the case if not thoroughly tightened. They did after a few flights (in August 2017) and the WingStabi came loose, obviously during a take-off run. In kind of a wing-over, the model turned back to the runway and touched it nose-down. Again I got off lightly as only the propeller broke and the repaired firewall abode the blow (against my expectation, see above). Now the zip ties got thin two-sided adhesive tape laid under them lest they slip off again, and they were really tightened.
 On the flying field, it would be inconvenient to use a laptop computer
with an USB cable to set parameters. To do all necessary adjustments to
the flight control parameters, this Bluetooth interface is plugged into
the extension lead and a smartphone is connected, which has the setup
program (or app) installed (with all functions needed in this case).
On the flying field, it would be inconvenient to use a laptop computer
with an USB cable to set parameters. To do all necessary adjustments to
the flight control parameters, this Bluetooth interface is plugged into
the extension lead and a smartphone is connected, which has the setup
program (or app) installed (with all functions needed in this case).
Air Pressure Sensor
There are two new sensors that replace some functions of the GPS and the ESC with augmented or new ones, respectively. The new sensors are just inserted into the sensor bus at a convenient place in the model. But prior to that, all members of the sensor bus have to be set up separately, one after the other, for the new telemetry configuration (see below). For the new sensors, that is easily done before installation. All sensors already in place have to be disconnected from the bus, connected to a PC and to a battery, and reconnected to the bus after re-setup (and maybe firmware update). That's a cumbersome procedure and a real drawback of the Multiplex Sensor Bus (MSB) system (which is more than ten years old now and surpassed by other R/C brands which can do setup and update from the transmitter with all sensors in place). Fortunately, there had been only four telemetry devices (GPS, receiver, temperature sensor, ESC) in the SrTM+ so far.
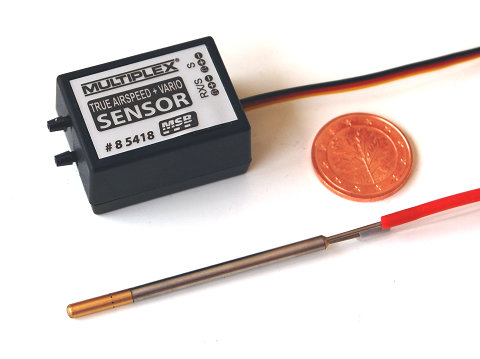 This is the "True Airspeed and Vario" sensor by Multiplex.
Its key component is the metal tube with the red and transparent-white,
flexible tubes connected to it. This is called a
pitot-static or Prandtl tube.
The flexible tubes are plugged onto the nipples on the box, which is made
a member of the sensor bus by plugging the lead into another device and
yet another device into this one (polarity shown on the label).
This is the "True Airspeed and Vario" sensor by Multiplex.
Its key component is the metal tube with the red and transparent-white,
flexible tubes connected to it. This is called a
pitot-static or Prandtl tube.
The flexible tubes are plugged onto the nipples on the box, which is made
a member of the sensor bus by plugging the lead into another device and
yet another device into this one (polarity shown on the label).
Basically, it's like the three barometric instruments in a full-size airplane: airspeed indicator, variometer, and altimeter. Airspeed is far more important to know for flying than speed over ground indicated by the GPS. Yet comparing both can show wind speed, hence the latter is still used here. Climb or descent speed, respectively, is important to know as well and not provided by the GPS, so the new sensor adds it in the first place. Altitude is virtually the same measured by the new sensor or the GPS. As a matter of taste, I just prefer the barometric value and no longer use the GPS value (which is still logged by the FlightRecorder).
Making the device even a true airspeed sensor may be well-intentioned, but indicated airspeed would be actually needed for flying the airplane (think of stall speed). That's why I would wish for a parameter to choose between TAS and IAS, or to have them both as options in the setup (my first wish). Then again, it's not that important because stall speed depends on flap deflection so the sensor can't be a real stall warning, anyway.
 The instructions say the sensor box should be installed on its
narrow side in the fuselage. Since the pitot-static tube has to
be installed under the wing in this case, I found it better to
put the box in the wing as well, just with its narrow side on
the bottom sheeting.
The instructions say the sensor box should be installed on its
narrow side in the fuselage. Since the pitot-static tube has to
be installed under the wing in this case, I found it better to
put the box in the wing as well, just with its narrow side on
the bottom sheeting.
The two flexible tubes are plugged on the left side and run through the wing to its outer rib bay where the pitot-static tube is. The two leads coming out of the box's right side are part of the sensor bus, to be connected to the Y-cable in the receiver and to an extension lead in the temperature sensor. The two leads on the far right are those of the two wing servos.
The instructions say not only the box should be placed on its narrow side somewhere in the fuselage; it should not be exposed to any air flow as well. Whatever the reason may be, there is no such place in the SrTM+ fuselage (mind ram air from the holey firewall) and the wing seems to be even the only place to avoid air flow. Why do we have a separate pitot-static tube and the sensor box has still to be protected? Would the sensor show temperature drift? Whatever, I wish they could build or heat insulate the box in a way that air flow is of no concern or, as for me, even thermostatically heat it inside to maintain ground temperature (my second wish).
 This is the pitot-static tube mounted under the right wing tip.
It must be in undisturbed air flow and that excludes any place
on the fuselage and even on the inner wings (where the flaps are).
Then, it must be in a place with a structure strong enough to hold
it. The wingtip lends itself as such a place because the air flow
is always about parallel to its bottom side regardless of
angle-of-attack – and because the big outer rib bay is
sheeted (maybe to make it strong enough for a grip when rigging
the model).
This is the pitot-static tube mounted under the right wing tip.
It must be in undisturbed air flow and that excludes any place
on the fuselage and even on the inner wings (where the flaps are).
Then, it must be in a place with a structure strong enough to hold
it. The wingtip lends itself as such a place because the air flow
is always about parallel to its bottom side regardless of
angle-of-attack – and because the big outer rib bay is
sheeted (maybe to make it strong enough for a grip when rigging
the model).
Anyway, a patch of 1mm plywood with two strips of 2mm plywood on it was glued onto the bottom sheeting's inside. A bracket was made from thin aluminum sheet metal, which could be fixed under the bottom sheeting with six small wood screws turned into the two plywood strips inside (very sturdy). A ballpen's body was fixed in the bracket's arch simply with double-sided adhesive tape with elastic interply.
This ballpen body is perfect because it has small guide bars inside its tip so the tube is well held in it. It had to be just drilled out to 3mm hole diameter. The ballpen body has been left open on the rear side, and the two flexible tubes coming out of it were just tacked to the bracket with a piece of white adhesive tape each. Then they were threaded through a 5mm hole in the sheeting and through the wing to the sensor box.
The rib bay next to the outer one had been opened before, meaning the film covering had been cut out. Then the plywood could be glued on the sheeting inside, and the flexible tubes could be threaded through the wing. Closing the rib bay again with a patch of new film covering was easy.
The key to this solution was having the idea to use a ballpen and finding a suitable one. It would be nice if the sensor's manufacturer would also consider wing mount of the pitot-static tube and offer a nicely shaped holder for that like on a full-size airplane (my third wish). It could be made from plastic, so wouldn't that be a case for 3D printing?
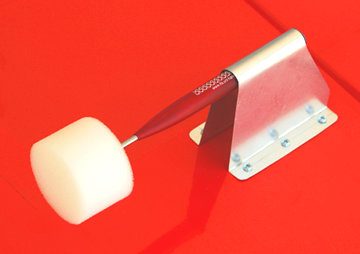 And how about a protective cover for the pitot-static tube, again like
on a full-size airplane (my fourth wish)? For now, just a round piece of
plastic foam with a hole pricked in the middle of one side is put on the
pitot-static tube as a protective cover. A cover is even needed when
telemetry is powered on: The tube has to be shielded from wind during
the sensor's automatic self-calibration. (But prior to that, the cover
should be briefly taken off for pressure equalization.)
And how about a protective cover for the pitot-static tube, again like
on a full-size airplane (my fourth wish)? For now, just a round piece of
plastic foam with a hole pricked in the middle of one side is put on the
pitot-static tube as a protective cover. A cover is even needed when
telemetry is powered on: The tube has to be shielded from wind during
the sensor's automatic self-calibration. (But prior to that, the cover
should be briefly taken off for pressure equalization.)
My wishes aside, the sensor works really well (if its supply voltage is regulated, see below). Mounting it under a wing tip seems to be not ideal, though. Somehow static pressure (for altitude) rises as well when dynamic pressure (for speed) rises, so there is a speed to altitude interrelation (see here, at the end of the section). But there's no better place for the sensor, and some means to calibrate it by software setup would be my fifth wish.
Cell Voltage Sensor
The second new sensor is far easier to install than the first one. It's just inserted into the sensor bus in the fuselage front and the drive battery's balancer connector is plugged into it.
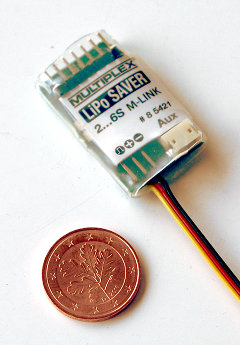 "LiPo Saver" is quite an ambitious name for a sensor that
just measures the drive battery's cell voltages, but it's not untrue
either. Basically it detects the battery's weakest cell, which
limits its whole discharge.
Possibly that could have prevented the mishap where I missed a warning
that the battery charge was too low
(see above).
In fact, one of the four cells was especially low and that could not
be recognized by the discharge counter or total voltage, but only by
monitoring each cell's individual voltage.
That way preventing exhaustive discharge might eventually save
the LiPo battery – and even better: the whole model.
"LiPo Saver" is quite an ambitious name for a sensor that
just measures the drive battery's cell voltages, but it's not untrue
either. Basically it detects the battery's weakest cell, which
limits its whole discharge.
Possibly that could have prevented the mishap where I missed a warning
that the battery charge was too low
(see above).
In fact, one of the four cells was especially low and that could not
be recognized by the discharge counter or total voltage, but only by
monitoring each cell's individual voltage.
That way preventing exhaustive discharge might eventually save
the LiPo battery – and even better: the whole model.
This sensor is not able to monitor the discharge during flight, so the discharge counter in the ESC is still needed. It can detect an individual, instantaneous discharge limit, though, and that's what makes it a useful or even necessary complement.
The device is made a member of the sensor bus by plugging the lead into another device and yet another device into this one (polarity shown on the label). After inserting the battery into the model, its balancer connector is plugged into this device – orientation and position are arbitray (great feature). Then, or even before, the battery is connected to the ESC (or rather the AntiFlash).
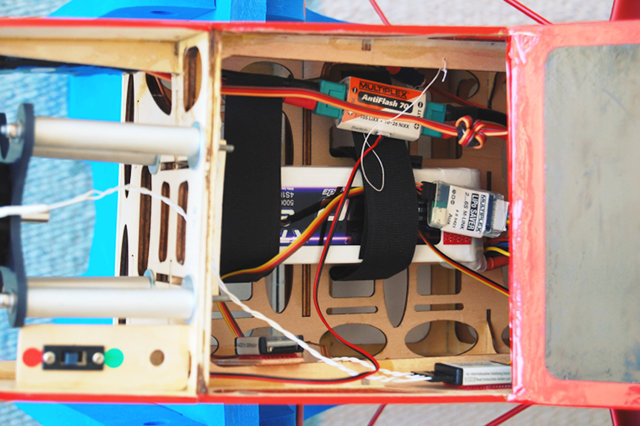 Once again, the sensor bus in the SrTM+ is slightly modified:
The extension lead coming from the True Airspeed sensor goes to
the temperature sensor box (bottom right in the picture, white
leads plugged).
Into that, this sensor is plugged, freely hanging in the fuselage
or put on the drive battery with Velcro (as seen here).
From here, the sensor bus runs to the FlightRecorder (the box at
bottom center) and finally to the ESC (top left).
Once again, the sensor bus in the SrTM+ is slightly modified:
The extension lead coming from the True Airspeed sensor goes to
the temperature sensor box (bottom right in the picture, white
leads plugged).
Into that, this sensor is plugged, freely hanging in the fuselage
or put on the drive battery with Velcro (as seen here).
From here, the sensor bus runs to the FlightRecorder (the box at
bottom center) and finally to the ESC (top left).
On top in the picture is the AntiFlash (the lead from the ESC to the receiver running over it). The red/black lead goes to the Safety Switch shown in the picture's lower left corner.
Telemetry Display
Actually it was an accessory for transmitters that had been upgraded to 2.4 GHz but had no proper display and tone output for telemetry. My ROYALpro9 transmitter had both, but nevertheless the display is a nice complement because it can show even four values (not only three) at a glance and with longer labels (the latter in conjunction with the WingStabi, see above). Besides, I just have to have such technical toys and bought it years ago when it just had been brought out. But it busted soon (first production run?) and I lost interest.
 With the upgrade items described above, my interest rose again and at
a good discount I got a new sample from the manufacturer. That was
worth it to me because it adds a new option to the telemetry system:
There may be kind of a division of tasks between the on-board transmitter
display and the additional telemetry display. While the former always
jumps to the page of values where a limit is exceeded or underrun and
warns with beeps and flashing value, this behavior can be switched off
on the latter. This way it can reliably show a set of four values,
meaning I can be sure that the values are displayed and no scrolling
is needed.
With the upgrade items described above, my interest rose again and at
a good discount I got a new sample from the manufacturer. That was
worth it to me because it adds a new option to the telemetry system:
There may be kind of a division of tasks between the on-board transmitter
display and the additional telemetry display. While the former always
jumps to the page of values where a limit is exceeded or underrun and
warns with beeps and flashing value, this behavior can be switched off
on the latter. This way it can reliably show a set of four values,
meaning I can be sure that the values are displayed and no scrolling
is needed.
There can be four such sets or pages, respectively, because up to 16 telemetry values are transmitted, and of course it's possible to scroll (with two small buttons). But I can do that intentionally and when I have time for it, and it's not done automatically or unintentionally, respectively. That way, four values at a time can be permanently monitored for some time, and then again four others. Only one problem has to be solved: finding sensible value quadruples (see below).
Both displays are actually the same size and even the font size is the same. The on-board display just has to show more than telemetry values: four trim positions (left, bottom, right) and the lock conditions of the two black adjuster knobs left and right on the transmitter (top). There's room left for only three telemetry values. On the accessory display, only telemetry values are shown so there's room for four of them.
The protruding display looks a bit clumsy, and actually it is. But it's not too bad and at least it makes for a more forward center-of-gravity in the transmitter. About half the weight of the omitted old 35 MHz antenna is compensated now (see above). And it's good that the accessory display is even further fore than the on-board display. I just don't like to have to look down to my belly to see a display.
For what it's worth, have a look at this transmitter's stick units. The whole gimbals are rotated to fit my thumbs' sideward movements. These are not parallel because the thumbs are inclined while the transmitter is held between both hands. (I'm a thumb-tip mode-2 flyer.) Rotating the gimbals minimizes coupling to the fore/rearward movements and is one of the reasons why I love this transmitter.
Receiver Battery
After the upgrade to the WingStabi (see above) and two new telemetry sensors (see above), some inexplicable telemetry problems occured: Sometimes a sensor would not start when the model was powered up and none of its values would be displayed and recorded. One of my unprofessional suspicions was that the S-BEC in the ESC with its thin lead (see above) might drop voltage due to high amperage during power-up so not all sensors on the bus could be recognized by the bus master. To test this theory, a receiver battery was bought (in August 2018) to replace (or bypass) the S-BEC.
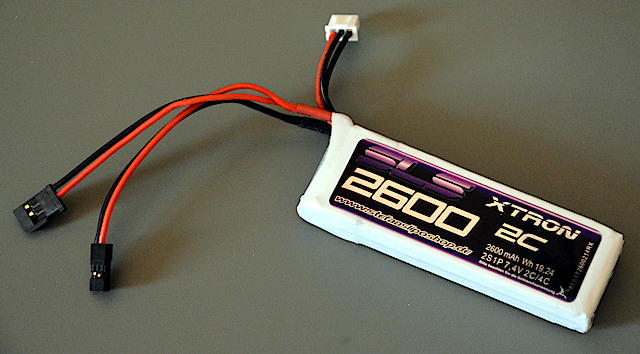
It's a special high-capacity LiPo that can stand only 2C continuous and 4C burst amperage, but this 2s 2600 mAh battery with all leads and connectors weighs only 65 g (2.3 oz).
5.2 A continuous amperage is more than the ESC's S-BEC tolerates and probably more than needed in the SrTM+. 10.4 A burst amperage is about the same as the S-BEC can stand and should be enough as well (after all it's a high-voltage, low-amperage system in the model).
The first flights with this battery showed that about 250 mAh are drawn in half an hour. If it would be used for 4 hours (impossible in one day), still 600 mAh (23% of full charge) would be left in the battery, so it's a quite safe solution.
Then, that means only 0,5 A is drawn on average, less than 10% of the 2C continuous amperage limit. And that were even flights in gusty wind and strong thermals, the latter extending the flight duration from 20 to 30 minutes. The flight stabilizer was working full-bore all the time so five servos were working all the time as well. Knowing the low current draw now is good news and that alone makes the battery well worth the low price for me.
I went cheap and simple and put the receiver battery piggy-back on the drive battery, both together Velcro-strapped in the model. The new battery is plugged into the spare extension lead that was already in the airplane, going to the WingStabi's battery/data port. This way I need no switch (which would have cost more than the battery) and I can go back to the former configuration (S-BEC instead of battery) anytime even on the flying field. An ordinary Y-cable is used to connect the USB or Bluetooth interface, respectively, in case the WingStabi has to be set up. The ESC's S-BEC has been disconnected by putting a short extension lead between the ESC's lead and the extension to the WingStabi's port 4, the red (plus) pin being removed from one connector. Now the drive battery is no longer needed to prevent the AntiFlash from producing Magic Smoke (see above).
For me, the receiver battery is a true upgrade. I feel safer now because a drive battery failure would no longer affect radio control and even telemetry. The drive battery is aging and might fail rather sooner than later (and it did really soon, see follow-up 1 below). The receiver battery is lightly loaded so it's unlikely to fail and I can use it all day long. No switch is used which could fail as well.
The first flights with the receiver battery went promising in that all telemetry sensors worked flawlessly. Unfortunately, the FlightRecorder did not work on the third flight, something that didn't happen before. Probably it was my fault that the MicroSD card wasn't properly pushed in. After that, the whole telemetry worked well. Actually I had suspected that the WingStabi – as the sensor bus master – somehow could have problems to recognize all devices on the bus when the model is powered up. But after all I yet don't know what it was – there are several ways for the telemetry runup to fail.
It could have simply been a lack of stabilized voltage, which is now about 8 V during the first flights after charge and quite stable. But it could have been a sensor-bus startup-sequence problem as well. The ESC is the last bus member and its sensor bus lead has only two cores (signal and ground, no plus) so its sensors are not powered from the bus but from the drive battery. So far, with the S-BEC, the ESC including its sensors ran up first, before the receiver (or WingStabi) as bus master could run up and power the other devices on the sensor bus. Now, with the receiver battery, the ESC's sensors start to work only when drive power is switched on, a while after the reduced sensor bus had time to run up correctly. So finally, there could have been a sensor bus overload during run-up as well, with the new ESC/S-BEC and two additional sensors.
Now there are simply no ESC values in the FlightRecorder's log file as long as the drive battery is switched off. Oddly enough, the LiPo Saver sensor on the drive battery's balancer connector sends values then, but they are all zeroes. With the drive battery switched on, the recorded values are correct. When the drive battery is switched off again, reported battery voltage is again zero but cell voltage is 1.3 V what is absurd. Obviously, the sensor works correctly only as long as it gets valid amperage values from the ESC (which are used to make the low-voltage warning depending on battery load).
Seems only Multiplex could explain the strange telemetry behavior with the S-BEC in use (and possibly remedy it), but probably that won't happen. For the time being I'll be content with a working battery-powered telemetry system, however weird (and inconvenient in setup) it may be. By all means, the new receiver battery serves its purpose at least in this respect and is a pleasing safety upgrade in addition.
Incidentally, it also helps balancing the airplane's tail weight. And there's another, unexpected benefit: It helps using the Drop Box. After plugging both drive and receiver batteries and closing the hatch, I can now put the SrTM+ back on the stand with the drive still not armed so there's no risk in having my arm in the propeller disk (pun intended). The model has to be upside down to open the Drop Box lid, pour candies in, and close it again – hence R/C has to be running.
Follow-up 1: The drive battery did fail only two and a half weeks later (in September 2018). One cell plummeted to 2.8 V and amperage downright collapsed. Battery voltage was still 14.0 V so power wasn't even reduced by the ESC. Instead I cut off power whereupon voltage bobbed up again, yet there might not have been enough energy left in the drive battery to power the S-BEC any longer. (See here for an investigation of this incident.) Anyway, the receiver battery was in place and easily worked for another 4 hours after the 20-minutes flight – from the moment when the model had been blown into a tree until it had been retrieved (undamaged). Like in confirmation of the blow, telemetry recorded 13 km/h (8 mph, 7 kt) average wind speed gusting up to 27 km/h (17 mph, 15 kt), and that was even with the pitot-static tube aslant to wind direction and in a tree (not in free airstream). So the model was shaken quite a lot, but servo movements were prevented by setting the flight stabilizer's no-gyro mode on the transmitter all the time. Still the servos drew current to hold the controls in neutral position. Motor-cutoff was set on the transmitter until the drive battery was safely switched off and disconnected. Fail-safe would have done the same in case the transmitter's battery would have run out of charge. All that worked because the receiver battery was there just in time to do its job as a backup, even for several hours. Once again I got off lightly.
Just as a reminder, my record of mishaps:
1 – Apr. 2016 – motor mount broken (see here)
2 – Oct. 2016 – ESC failed (see here)
3 – Oct. 2016 – landing gear bent (see here)
4 – Oct. 2016 – wheel slipped off (see here)
5 – Jan. 2017 – elevator servo busted (see here)
6 – Aug. 2017 – flight stabilizer got loose (see here)
7 – Sep. 2018 – drive battery failed (see here)
 Follow-up 2: Finally, the "True Airspeed and Vario" sensor
again failed to start when the receiver battery was plugged (in November 2018).
It just didn't send any values on the sensor bus. Now Multiplex says that's a
problem of too high voltage so a small voltage regulator stabilizing the
sensor's voltage at 5.5 V would help. That's easily doable in this case
because the GPS needs at least 6 V but the rest of the sensors at the other
end of the bus will well do with 5.5 V. So the regulator is put between the
Y-cable in the WingStabi and the Airspeed/Vario sensor.
The receiver battery was actually bought to solve this problem in the first place
(and cost a bit less than the regulator) but is rather a great safety feature
after all.
Follow-up 2: Finally, the "True Airspeed and Vario" sensor
again failed to start when the receiver battery was plugged (in November 2018).
It just didn't send any values on the sensor bus. Now Multiplex says that's a
problem of too high voltage so a small voltage regulator stabilizing the
sensor's voltage at 5.5 V would help. That's easily doable in this case
because the GPS needs at least 6 V but the rest of the sensors at the other
end of the bus will well do with 5.5 V. So the regulator is put between the
Y-cable in the WingStabi and the Airspeed/Vario sensor.
The receiver battery was actually bought to solve this problem in the first place
(and cost a bit less than the regulator) but is rather a great safety feature
after all.
Follow-up 3: In the 2019 flying season, all worked well. The ESC no longer displayed any nonsense values (like negative rpms) – since the BEC was no longer used and for whatever reason. The other sensors behaved likewise and started up reliably – probably because their voltage is now stabilized at 5.5 V.
Drive Battery
In September 2018, the 4s 5000mAh 30C LiPo drive battery had died from cell failure (see previous section). The equal replacement battery had been used for only a few flights in 2018 and 2019 and not used at all in 2020 (because I concentrated on my new HIROBO Schweizer 300 helicopter). It had been storage-charged, though, and was taken out of storage in the summer of 2021 as were all my other LiPo batteries. All of them still had 3.78 V cell voltage after having been charged to 3.85V and stored in the same concrete box for several months. Just one cell of this battery had only 2.4 V so it had to be scrapped after only very few flights. The cell had been weak (that is bad) from the beginning (it lagged during charge) – must have slipped quality inspection. Obviously some just die.
Anyway, the SrTM+ hasn't been flown in 2021 because the battery turned out to be bad right at the beginning of the flying season and no new battery was available since the cells were in short supply. There is a new one for the 2022 flying season, just in time to test an upgrade of the WingStabi flight stabilizer firmware.
Mid-Air Photo
Finally a photo of the model in the air, with the landing gear bungee, the Drop Box lids, the pitot-static tube, the tail servos, and the tail landing gear visible (as well as the warped elevators):

The model was there (among a lot of vintage models) to celebrate the 50th anniversary of the Telemaster design.
Setups:
R/C Setup
After the linkages had been improved (see above) and set up (mechanically and in the transmitter), and again after re-placing the rudder and elevator servos (see above), the linkage characteristics have been analyzed in retrospect. That was not at all necessary, particularly since all linkages turned out to be problem-free. It's just interesting and fun, at least for me, to do it with the Linkage Design spreadsheets by Blaine K. Beron-Rawdon.
Linkage Geometry
The Linkage Design spreadsheets provide stylized sketches of the linkages. Servo arm, pushrod, and control horn lengths are even drawn to scale. The "center" or "neutral" position is outlined with solid lines, the two extreme positions with dot-and-dashed lines.
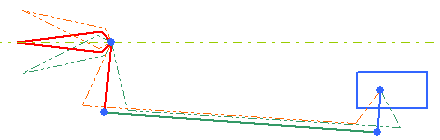
Elevator linkage, stock version, side view. It's approximately
two-dimensional (2D), nearly no lateral movements. Hence it's quite symmetrical
(throws in both directions) and linear (virtually no "expo effect").
Servo arm has 60% of control horn's length. 20° throw shown both up
and down, would be 25° at full dual-rate.
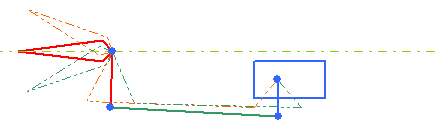
Elevator linkage, retrofitted version
(see above) with micro servo
under the stabilizer's bottom, side view. It's exactly two-dimensional
(2D) now, so no lateral movements. Hence it's quite symmetrical (throws
in both directions) and linear (virtually no "expo effect").
Servo arm has 65% of control horn's length. 25° throw shown both
up and down (full dual-rate).
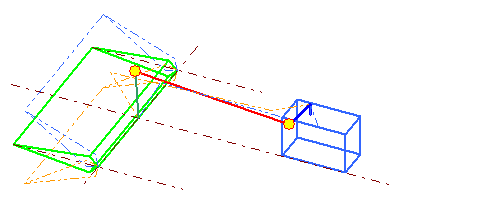
Rudder linkage, improved stock version
(servo turned around), seen from lower right side like in the picture
above. It's three-dimensional (3D), noticeable lateral movements. It's
not linear, there's a bit of a "positive expo effect", servo
arm even 70% of control horn's length. 30° throw both left and right
(down and up in this sketch).
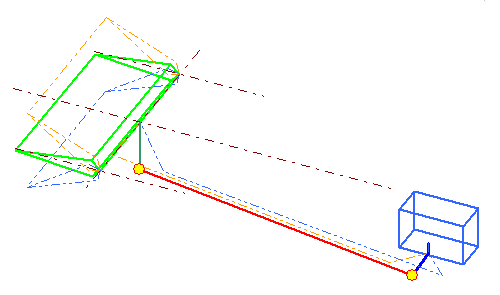
Rudder linkage, relocated
servo (see above) with
longer pushrod, seen from lower right side like in the previous sketch,
but actually the servo is now at the fuselage's left side. It's
three-dimensional (3D) as well, so some lateral movements. It's not
linear, there's still a bit of a "positive expo effect",
servo arm again even 70% of control horn's length. 27° throw
left and 30° right (down and up in this sketch) due to
mechanical limitations.
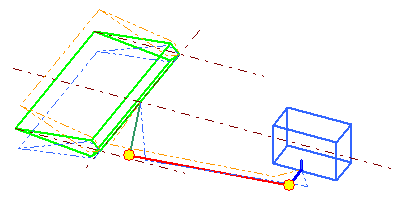
Aileron linkage, right wing, seen from
upper right side. As well 3D, not linear, a bit of a "positive
expo effect", long control horn and short (43%) servo arm.
Different throws, 18° up (servo arm 42° aft) and 15° down
(servo arm 37° fore), meaning 20% differential.
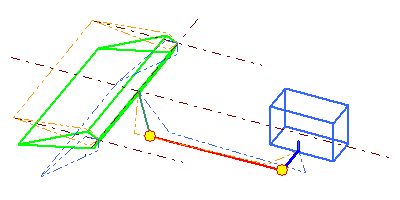
Flap linkage, right wing, seen from upper
right side. As well 3D, but nearly linear, servo arm nearly as long
(75%) as control horn. Three positions: cruise (flap 0°, servo
arm 19° aft), takeoff (flap 20°, servo arm 0°), landing
(flap 45°, servo arm 43° fore).

Again flap, only now the servo arm set up
as a "knee-lever" to reduce maximum servo torque. Even more
3D, and now non-linear, requires longer rod. Three positions: cruise
(flap 0°, servo arm 5° aft), takeoff (flap 20°, servo
arm 28° fore), landing (flap 45°, servo arm 72° fore).
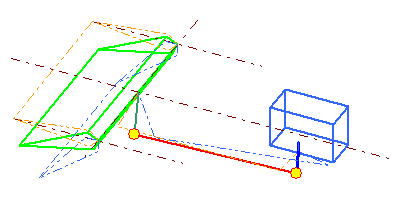
Once again flap, now additionally the control
horn set 25° back for at least a bit "knee-lever" effect.
As well more 3D and non-linear, requires even longer rod. Three
positions: cruise (flap 0°, servo arm 5° aft), takeoff
(flap 20°, servo arm 22° fore), landing (flap 45°,
servo arm 76° fore).
Aileron Leverage
The aileron is a perfect example of a linkage centered at neutral but with yet different deflections. The arrangement with servo and control axis perpendicular to each other makes for noticeable asymmetries and non-linearities. Quite different servo arm and control horn lengths (second hole at 0.64", 1.5") may contribute their share.
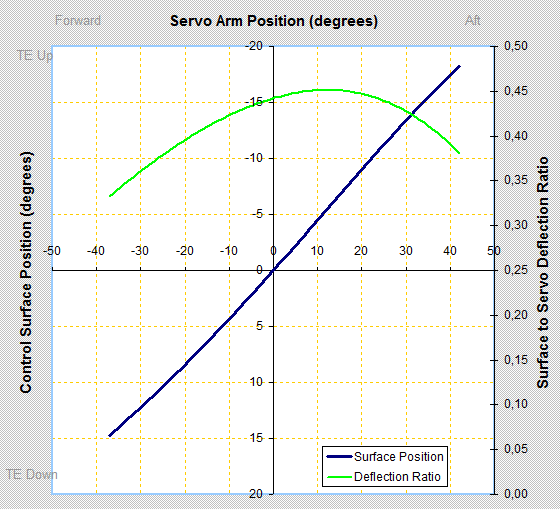
That's the "positive expo effect" mentioned above.
The blue line shows the aileron position (vertical axis, +15°
down to -18° up) dependent on the servo arm position (horizontal
axis, -37° fore to +42° aft). And this line is not straight
but S-shaped. It rises progressively from -37° to about +12°
and then declines slowly. (Hold a ruler to it.)
The green line is the deflection ratio, that is aileron deflection divided by servo arm deflection. That's kind of a gear ratio. It means that the aileron moves less than the servo arm, and reversely that servo torque is smaller than aileron moment. It's also the slope of the blue line, the green line's maximum marking the blue line's inflection point.
Due to the asymmetric 3D linkage geometry, this maximum gear ratio (0.45) is not at servo and control center but displaced to about -6° aileron up. Being the wrong way round for low torque, the gear ratio is smaller (0.33) at the smaller down deflection (+15°) and bigger (0.38) at the bigger up deflection (-18°).
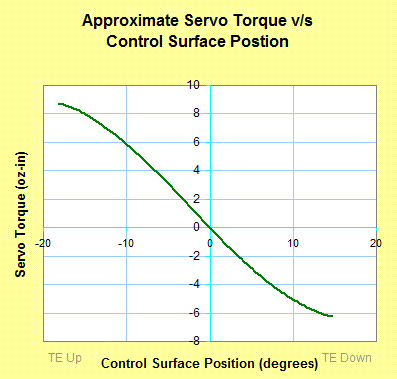
There's nothing one can do about this asymmetry. Fortunately, the servo
torque line is still roughly how one would expect. Torque is zero at
neutral aileron, it's 6 oz·in at the +15° down deflection
and 9 oz·in at -18° up.
The linkage works like a knee lever and that's why servo torque doesn't
increase proportionally but on a diminishing scale. So we have a nice
asymmetric S-shaped curve. It's mirrored from the blue line above that
shows aileron and servo arm deflection.
This movement non-linearity (blue line above) is not as pronounced as
that of torque, and actually it doesn't need correction. But if one wants
to correct it, there are two ways:
(1) This "positive expo effect" could be canceled by an opposite
(negative) expo of equal size. Problem is that this expo would have its
inflection point at neutral and not at -6° up aileron.
(2) The asymmetric S-shape could be approximated by a five-point servo
calibration. Problem is that this curve would be angular and not smooth.
Maybe it's splitting hairs, though. Rather I'd set a decent negative
exponential rate (-40% for instance) to have sensitive aileron control
around neutral. But not even that is needed on a SrTM+ so this whole
consideration is theoretical. It's just nice to know that all is in
good order.
Flap Leverage
The flap is an example of a linkage that is neutral in one extreme position and that goes down all the way to the other extreme. Despite the arrangement with servo and control axis perpendicular to each other, there is no noticeable non-linearity. Not very different servo arm and control horn lengths (fourth hole at 0.84", 1.14") may contribute to this.
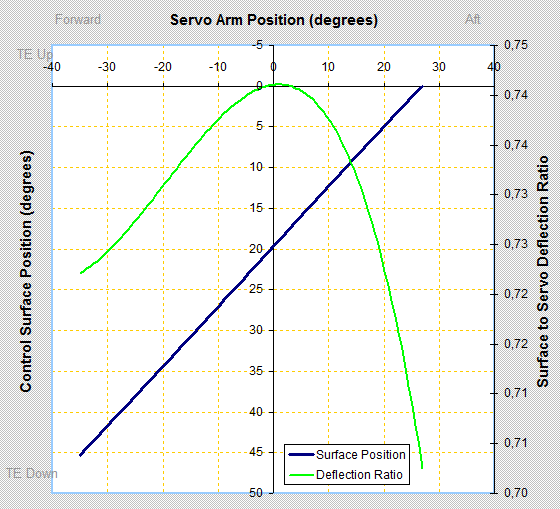
There's no "positive expo effect" in this case. The blue line
is virtually straight. (Again, hold a ruler to it.) That's a good sign
in the first place.
The deflection ratio (green) line is peculiarly shaped. This leverage or "gear ratio" has its maximum near servo arm neutral (20° flaps) what seems plausible but isn't good for flaps. Quite wrongly for low torque, it lessens most to retract position (no load) whereas it's only a bit smaller in down position (maximum load). But the differences are grossly exaggerated by the axis scale in the diagram. Note that the whole span of ratios is only 0.705 to 0.745 what is pretty small.
This small span makes the blue line virtually straight, meaning nearly linear movement. So obviously this is still quite a good flap linkage geometry.
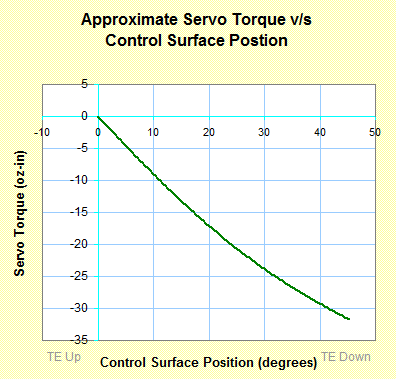
In fact it could be even better, though. There's still the familiar
curvature of the torque line, even if not an S-shape. That's not bad
but it would be better if the curve at least wouldn't be that steep
and torque wouldn't increase that much towards full deflection. To
this end, the leverage ratio should decrease distinctly and
consistently towards bigger deflections.
Alternative Flap Leverage
That in turn requires making both the servo arm and the control horn kind of knee-levers. Moving the control horn hole for the clevis pin quite a bit back, preferably to 45° inclination back referred to the hinge pins (instead of now 5°) is of limited effect because the flaps move only by 45%. The servo arm with its 90° travel can be a true knee-lever, though, so that is analyzed here.
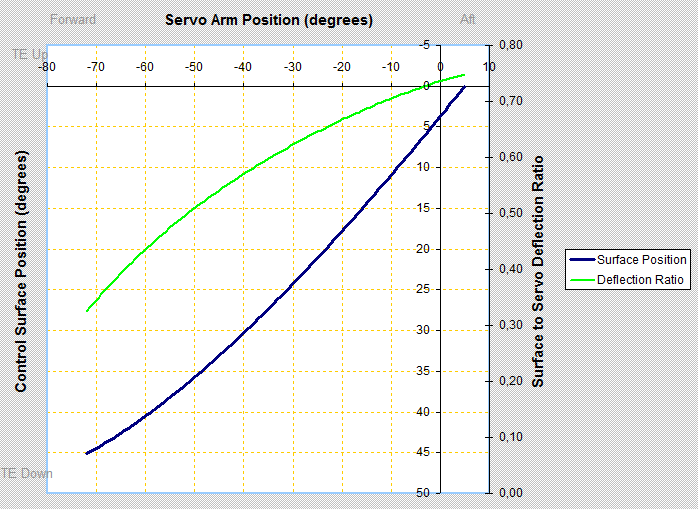
For practical purposes, that is to avoid the extreme 90° point of
a knee-lever with nearly no control movement, the foremost servo arm
position has been limited to 72°. The rearmost position has been
set to 5° instead of 0°. The servo arm has to be installed so
that servo neutral is about 40° forward. A longer pushrod than
before is needed.
As intended, the deflection or leverage ratio (green) decreases towards bigger flap deflection. It goes from 0.75 to 0.32 – quite a bit. Of course, the blue line is no longer straight, but that's no problem with flaps. We can expect a substantial reduction of maximum torque.
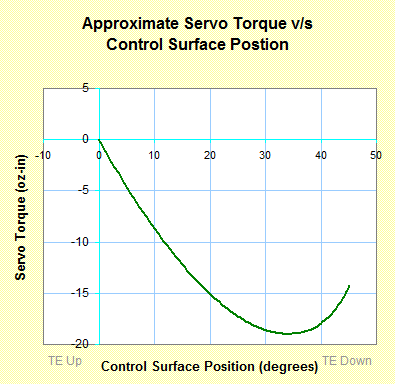
In fact it's reduced by 40% – very good. A little surprise may be
that maximum torque is no longer at full flaps (45°) but at about
35°. On closer inspection that is not surprising, though, simply
because the flap load increases faster than the knee-lever effect below
35°, and slower above (roughly speaking). The knee-lever effect is
highly non-linear.
For the same reason, the flap control horn should not be set back to 45° but only 25° so it's perpendicular at the point of highest servo torque. That makes the torque curve even more curved, shifts its maximum to 30° flap deflection, and reduces torque by another 6% – only.
The Linkage Design spreadsheets by Blaine K. Beron-Rawdon are really nice tools just to experiment with the linkage layout. In this case, servo arm and control horn rigging angles were variables. Flap and servo geometry (horn lengths and angle ranges) were given. When deciding for certain rigging angles, result would be the pushrod length needed.
Moving the control horn hole for the clevis pin back to 25° inclination referred to the hinge pins is not easily possible on this ARF, the effect would be marginal, so it's not worthwhile. For better looks and out of laziness, I didn't even replace the nice black rods by ugly threaded ones and content myself with the first (improved) linkage version (see above), which is not bad at all. The only point to observe is the substantial flap servo torque, which is nearly four times as big as that of the ailerons. The simplest and most obvious provision would be flight speed limits for the typical 20° and 45° deflections.
Servo Torque
The following is a synopsis of the linkage analysis done with the Linkage Design spreadsheets:
| control | servo | torque | force | ||||||
| Control | left/up | right/down | aft | fore | oz·in | N·cm | oz | N | remark |
| rudder | 30° | 30° | 45° | 45° | 7.2 | 5.1 | 14.7 | 4.1 | |
| rudder 2 | 30° | 30° | 43° | 45° | 7.8 | 5.5 | 12.8 | 3.6 | (longer pushrod) |
| elevator | 20° | 20° | 35° | 35° | 12.3 | 8.7 | 17.3 | 4.8 | |
| elevator | 25° | 25° | 45° | 45° | 13.4 | 9.5 | 21.9 | 6.1 | (more throw) |
| elevator 2 | 25° | 25° | 41° | 42° | 8.0 | 5.6 | 13.5 | 3.7 | (one half, micro servo) |
| aileron | 18° | 15° | 42° | 37° | 8.7 | 6.2 | 18.5 | 5.1 | |
| flap | 0° | 45° | 27° | 35° | 31.7 | 22.4 | 43.7 | 12.1 | |
| flap alt.1 | 0° | 45° | 5° | 72° | 18.8 | 13.2 | 60.9 | 16.9 | (servo arm as knee-lever) |
| flap alt.2 | 0° | 45° | 5° | 76° | 17.7 | 12.5 | 58.3 | 16.2 | (control horn as knee-lever as well) |
The possible (or nominal) 45° servo travel both aft and fore is now utilized at least for its better part. For the ailerons with their small deflection that is possible by using the second hole in the servo arm. Using the fourth (outer) hole for the elevators, which have small deflection as well, turned out to be perfect for increased (dual-rate) deflection. That still holds for the new micro elevator servos.
Maximum servo torque is calculated for 55mph, the assumed maximum level flight speed. That's not much compared to the speed of pattern models for instance, and even this model may get faster in a dive, but it's far more than its best cruise and climb speed (35mph).
For a safety margin, I would make the specified servo torque at least twice as big as the calculated requirement. That allows for some linkage friction as well as inaccurate (because simplified) calculations and somewhat optimistic specification. Besides, it ensures that the target deflection is acceptably approximated under load. (This are literally Blaine K. Beron-Rawdon's recommendations.) With today's digital high-voltage servos, this may be even no longer necessary in this great measure.
Except for the flaps, the torque requirements are ridiculously small compared to the maximum servo torque at 6V: 89 oz·in (63 N·cm) for the HS-5495BH standard servos and 50 oz·in (36 N·cm) for the HS-5087MH micro servos (the new elevator servos). The modern digital servos just are that powerful. For rudder, elevator, and ailerons, smaller servos could be used without problems. The aileron servos could even be replaced by one central servo. Maybe in this case still a powerful standard servo would be used to overcome the friction of the more complex linkages.
The flap servos could as well be replaced by one central servo, just not a smaller one. 63 oz·in (45 N·cm) for both flaps plus some linkage friction might seem critical in this case since there is absolutely no torque reserve with the digital standard servo. The linkage geometry could be modified for substantially less torque (35 oz·in / 25 N·cm). But remember that no full-scale airplane can deploy flaps at maximum flight speed and a model airplane shouldn't likewise.
At even 35mph (best cruise and climb speed) the torque for both flaps is only 26 oz·in so there's no longer a problem. Alternatively, one could use a 2s LiPo battery with 7.4V so the servo would yield 104 oz·in (74 N·cm) torque. Even 50mph flight speed would be no stretch then. But the simplest and hence best solution: The first flap level (20°) requires only 34 oz·in (24 N·cm) torque for both flaps at even 55mph, so just deploy 20° flaps for approach and the model will slow down. Now deploying full flaps on final approach will be a no-brainer.
Maximum pushrod forces of rudder, elevator, and ailerons are really push (compression) forces, but they are no problem at all for the short 3mm diameter steel rods (2mm for the new elevator linkages). If the servos would be placed in the middle of the fuselage, the long pushrods required then had to be very rigid, so pull-pull linkages would seem better, lighter, simpler, and even cheaper. Flap pushrod force is only a pull (tension) force so there's no problem anyway.
The bottom line is that the linkage and servo setup is good as it is now and can be left that way.
Servo Resolution
The Multiplex 2.4GHz digital radio link (M-LINK) has 12 Bit resolution (4096 steps), and even ordinary digital servos have still half of that: 11 Bit resolution (2048 steps). (Only special premium servos have 12 Bit resolution.) Add to that the digital servo "rigidity" meaning little slippage under load. By all means, centering accuracy and repeatability is outstanding compared to old "analog" times.
The transmitter has a Fast Response feature meaning it transmits servo pulses every 14 milliseconds instead of 21 ms. I can see no other effect than better centering resolution. One single trim click gives a small movement at 14ms while it's only about every second click at 21ms. At least that's what I observed.
Servo Amperage
The servo current draw is hard to estimate, but at least the servos' standby current is very low (below 100mA for all six, or later seven servos, even eight with Drop Box). Even though the controls are not balanced and their (low) weight burdens the servos (a little) these don't buzz or draw a noticeable current. And even when all servos are swayed at once and as much and fast as possible, it is hard to draw more than 1A (measured in the workshop with a digital amperemeter).
The S-BEC in the ESC is rated for 3A continuous current and for 10A bursts, so that seems to be safe. Digital servos have a reputation of being amperage hogs, but that's not true at least in this case, maybe due to the high-voltage servos used with "only" 6V. If servo amperage would however get too high in flight, the only indication would probably be a receiver (or S-BEC) voltage drop, which is why I set a tight 6.0V warning threshold for it in the telemetry (see below).
That had to be modified when I used a separate receiver battery instead of the S-BEC in the ESC (see above). Actually, this battery is used to avoid the S-BEC's voltage instability, but as a side benefit, mean servo amperage is known now: 0.5A even in gusty winds and thermals, the flight stabilizer working five servos (ailerons, elevators, rudder) all the time. That includes the current drawn by the WingStabi-receiver combination and all telemetry sensors and pertains to 8.0V voltage. It is less than 10% of the receiver battery's 5.2A (2C) continuous amperage rating. This quite low 0.2C amperage load and therefore even 4 hours safe usage time justify a quite high 3.7V cell voltage warning level, just a tad below the lowest tolerable idle voltage (3.75V).
General Setup
(Before the flight stabilizer upgrade, see above.)
The Multiplex ROYALpro transmitter can switch four different flight modes (or flight phases, as Multiplex calls them), three of them "normal" and one "special" (overriding the normal ones). They are used to set different configurations for cruise flight, takeoff, and landing (normal) as well as for thermalling (special).
All control deflections are regarded as sufficiently linear so servo calibration is done with only three calibration points each (not five as would be possible). Instead – because rudder, elevator, and ailerons are quite effective – some negative exponential (-40%) is set on all of them just for sensible control around neutral in cruise flight mode. In takeoff and landing modes as well as in thermalling mode, the same -40% expo is set on all controls.
Dual rate (reduced or rather increased control throws) is generally not needed for this airplane with its slow flight speed or small speed range, respectively. Exception is elevator for which I set a dual-rate for increased throw. In idle-power landing approaches and flares, I feel the need to have more up elevator effect. Flipping the dual-rate switch increases elevator throw from 20° to 25° what incidentally just utilizes the full 45° maximum servo travel, so it could be set without mechanical modification.
The flap servos are calibrated with three points as well as the other servos, but of course one point is flaps up, the other extreme is flaps down, and the middle point is 20°. (I copied and customized the transmitter's standard mixer which is meant for up-and-down camber flaps.) The slider on the transmitter has a notch in its middle position so the three typical flap settings are tactile. These are also tied to the flight modes cruise (0°), takeoff (20°), and landing (45°) for convenience. Slow servo speed is set to 6 seconds for full 45° travel, the biggest value possible. That gives the airplane time to accelerate or decelerate, respectively, and limits flap and servo strain.
The ailerons have been set to equal up and down deflection in the servo calibration. Differential is accomplished by a mixer whose effect is adjustable. That way the amount of differential is made dependent on flight mode. In cruise flight ("clean configuration") it's 20% as recommended, in takeoff mode (flaps 20°) it's 30%, and in landing mode (45° flaps) it's even 40%. If the ailerons are drooped together with the flaps (see below), 100% differential is the flaperon mixer's default in Multiplex transmitters, meaning no down travel at all. Later I reduced it to 67% to have some down and more up throw and suitable aileron effect at all.
Adverse yaw is not nearly canceled by aileron differential. That is typical for models with big airfoil camber like SrTM+ and that's what the combi mixer (as Multiplex calls it) is made for. It mixes pertinent proportional rudder to aileron deflection. Like aileron differential, it's set to a low value (50%) in cruise mode and appropriately more in takeoff (75%) and landing (100%) modes where airfoil camber is even bigger due to flaps and flight speed is lower. It can be switched off, though, in case it's unsuitable like in aerobatics or crosswind landings. It can't be used to boost rudder throw, anyway, due to the limited elevator cutout for the rudder and since the Multiplex transmitters fittingly don't simply add up but rather blend in stick and mixer input.
A mixer is set to droop both ailerons together with flaps, beginning at 20° flaps and going to 15° at full flaps. Being a gadget, it can be switched off. As mentioned above, if the mixer is active and flaps are 45° down and ailerons 15°, by default the ailerons will not go down further and only up to neutral position for aileron effect. That's actually a good feature of the mixers in all Multiplex transmitters, but I overrode it to have a bit more up, and some down aileron throw at all. In this case there's no danger of tip stall but the need for more throw to have sufficient aileron effect.
Being another gadget, a "camber" mixer is set to droop both ailerons and flaps together, that is nearly the whole wing's trailing edge, by about 10°. That is what gliders do in thermals and that way SrTM+ can thermal a bit better as well. There's a fourth flight mode (thermalling), activated and deactivated by a toggle pushbutton, and overriding the other three modes. Aileron differential (67%) and aileron-rudder mix (100%) are as big as in landing mode, that is with full flaps.
Additionally, there was a three-way switch to set this flap-aileron camber to 0°, 5°, and 10°. Later, I swapped the switch and the slider. Flaps are practically always deployed by flight mode selection so the switch is now used for them. On the other hand, it's convenient to trim the model with a tad of wing camber (as an alternative to elevator) so the slider is now used for that.
It's even possible to mix aileron to flaps (only down of course) to help rolling, but it turned out to be not really effective. Again, there's an exception: Drooped ailerons (always together with flaps) are not effective because they can't go down much further, so a flap going down is a welcome backing. Of course, full flaps can't go down any further so this mix helps only with 20° flaps or 10° ailerons/flaps camber, where it's really helpful though.
Basically, in cruise flight mode no elevator mixer is set to compensate for pitch changes induced by power settings. Actually, these pitching effects are very desirable because they make flying the airplane easier. Full power gives correct climb attitude, idle power correct glide. These flight attitudes may be fine-tuned with the compensation mixers, though.
Flaps 45° mean so much decalage and drag above C/G and thrust line that even substantial down elevator is required. On the other hand, with flaps retracted the airplane needs a bit up elevator to be trimmed for slow flight as befits a Telemaster. Flaps 20° down make for a nose-up, slow, and stable trim as desired, if the elevator is in line with the stab's flat bottom. So I chose to set quite some flap-elevator mix for full flaps (substantially down) and flaps retracted (a bit up), but none for 20° flaps. Still no power-elevator mix is set. That's just about right so no elevator, but only throttle is needed to control both attitude and slope in climb or landing approach, what makes them steady.
In the transmitter, throttle was initially set to 1.2 seconds runup time from idle to full, regardless how fast the throttle stick is moved, to limit rpm acceleration and consequential amperage peaks. Additionally, motor runup was set to "soft" in the ESC, what should mean 0.9 seconds runup time. The latter seemed to have more effect because the ESC sees a slow runup from the transmitter and makes it even slower. I liked it that way so I didn't check the real reason. Such a sluggish motor runup is something that needs getting used to, though, particularly as it's even more sluggish at low power settings, for instance during landing approach. Later, that slow runup turned out to be not needed to avoid amperage peaks, so the runup time in the transmitter was set to 0 but the soft runup in the ESC was kept.
Propeller brake at throttle stick back is not activated in the ESC because no folding propeller is used and the brake would be active for only a few seconds, anyway. Airbrake effect of the windmilling propeller would be noticeable only at high flight speed. If needed at slow speed, a fair amount of airbrake effect is achieved by flaps.
As usual with electric models, a timer has been set that is activated by the throttle stick (advanced to more than ¼ throttle). It warns after 20 minutes motor runtime (a pretty good estimate) to avoid running out of battery charge. Actually this is no longer needed since it's replaced by a much better feature: The amperage sensor and discharge counter in the ESC (see below) and the later retrofitted cell-voltage sensor (see above) warn via telemetry.
Fail-Safe
It is easily set when setting up the receiver with a PC or, maybe even easier, anytime with the transmitter's "Set Fail-Safe" function.
Since I don't have any special criteria for fail-safe, I just chose power off (really important for safety), all three controls (ailerons, elevator, rudder) neutral, flaps 20° down (slow, nose-high trim), and Drop Box closed (no unintentional drop). Whatever maneuver the SrTM+ is just in then, it should gradually go for a straight and slow glide, what is my best bet for a radio drop-out probably far away from the pilot. If it were a glider, I would let it circle to come back into radio range, but SrTM+ glides not exactly well so a controlled encounter with terra firma seems more desirable.
After the receiver had been replaced by the WingStabi (see next section), all fail-safe settings were reproduced there. Additionally, the gyro mode was set to "no gyro effect". The already small self-righting ability of the SrTM+ should not be damped by the flight stabilizer. That's a precondition for my consideration in the previous pragraph. Besides, the no-gyro mode turned out to be convenient when the model had been blown into a tree and was shaken by gusty winds for four hours (see above). The gyro gain setting is irrelevant in no-gyro mode and was just set to "low".
If the radio link is lost, telemetry should be lost as well, but just in case it's still there I set channel 8 (voice output) to full, meaning I'll hear the flight data enunciated by the Souffleur (telemetry voice-output device, see below). Since I rarely do that intentionally, this would be a hint that the radio link is lost.
Again in lack of any criteria, I kept the manufacturer's Hold settings, which is to hold all servo positions for ¾ of a second after the radio link is lost, and then set them all to their fail-safe positions. So far, I have no idea to what end the holding time should be modified or why some servos should be held in their current position during the whole drop-out. (On second thought, the latter could be appropriate for the Drop Box lid servo, but it's not really needed.)
New Setup
(After the flight stabilizer upgrade, see above.)
When the simple receiver was replaced by the WingStabi receiver/gyro combination (called flight stabilizer by me), the R/C setup stayed basically the same. Its better part had to be moved from the transmitter to the new device, though. That is because it mixes transmitter and gyro inputs to make for a controlled and stabilized flight. Any mixers in the transmitter, even a simple combi (aileron to rudder) mixer, might fool the device as it would (in heading-lock mode) take the mixed input (rudder) as a command to yaw while it's actually meant to compensate adverse yaw. Consequently, such mixers as well as all servo adjustments have to be done in the WingStabi, which is therefore arranged for all of these things.
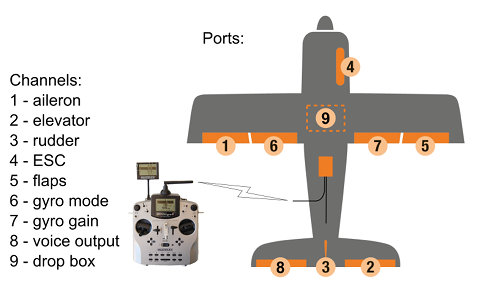 This airplane sketch with servo-port assignments to the controls is
borrowed from the WingStabi instructions. As recommended, I adopted
the Multiplex standard assignment shown here and just added port 8
for the second (left) elevator
(see above)
and port 9 for the Drop Box lid.
This airplane sketch with servo-port assignments to the controls is
borrowed from the WingStabi instructions. As recommended, I adopted
the Multiplex standard assignment shown here and just added port 8
for the second (left) elevator
(see above)
and port 9 for the Drop Box lid.
Servo ports are the plug-in positions for servos and ESC. Basically, you have to tell the WingStabi what kind of control is connected to what port, something that has been formerly done in the transmitter. Likewise, servo center and travel adjustments have to be done in the WingStabi, as well as all fail-safe settings (which have to be amended now, see previous section).
Of course, "functions" (controls) have to be assigned to radio channels in the WingStabi. Again, the Multiplex standard assignment has been adopted. Now all mixers can be set up like in the transmitter before, and finally the desired gyro effect in the WingStabi flight modes (or gyro modes) has to be defined – what the WingStabi is actually meant for.
What remains in the transmitter is only the assignment of sticks, sliders, and switches to radio channels, and in this way to "functions" (or controls). As a side benefit, fewer channels are needed, that is only one channel each for three controls (aileron, elevator, flaps) whose two servos each are now controlled by the WingStabi. Transmitter flight modes can still be used to set the three distinct flap positions. Mode-dependent dual-rate and exponential settings may be done in the transmitter as well, and in fact these are not provided in the WingStabi. This is no design flaw, though.
A simple transmitter would be not suitable, anyway. A moderately expensive one is needed for today's telemetry, with appropriate display and voice output. But most notably, and perhaps surprisingly, more channels are needed than before. There can be 4 gyro modes, 3 separate gyro gain channels, 4 flap modes, and 3 trim channels (for a true in-flight control trim). All that alone would require 10 channels and corresponding sliders and switches, in addition to the 6 channels for basic controls (aileron, elevator, rudder, power, flaps) and accessories (the Drop Box).
My 9-channel transmitter is at the lower limit; today's 16-channel transmitters seem just about right and could be even used with my 9-port (but 16-channel) WingStabi version. (Now we know what that many channels are good for.) Just the sophisticated way of programming and the good mixer features being distinctive of Multiplex transmitters are no longer needed. But they are all copied to the WingStabi and the setup program (or app) belonging to it.
So I had to make do with only 9 channels, one spare slider, and – under these circumstances – enough switches. Only three of the gyro modes are used ("no gyro effect", "damping", and "lock"), the fourth (usually an "aggressive lock" for 3D flying) being not needed here, anyway. The spare slider is used for gyro gain of all three axes combined. The other slider is for extending the flaps, and there are no flap modes at all (actually not needed here). The fancy flap-aileron mixers have been omitted because they can't be set up like before, but that is not exactly a loss. Aileron differential and combi (aileron-rudder) mixer can no longer depend on flap deflection. They are fixed to the flaps-up setting now, but that is actually OK. The flap-elevator compensation mix has been set exactly like formerly in the transmitter. There is still no power-elevator compensation mix because it can't be made dependent on flap deflection. So the SrTM+ is now mostly set up as before, save some dispensable mixes, but with the added feature of two stabilization modes, as usual a damping and a lock mode. After having tested said mixers before, the SrTM+ is now a test bed for the flight stabilizer including its gyro setup.
For a start, I adopted the setup prepared by Multiplex for their FunCub. It's a suitable template for the SrTM+ setup because both airplanes are shoulder-wingers with flaps. There is one digital PID controller for each axis, and a set of several parameters for each controller. I used the FunCub template so I could leave those "advanced" parameters unchanged, reducing complexity. They turned out to be suitable for more than a start.
In the "basic" parameters, Multiplex had set gyro sensitivity (gain) to a very conservative, low default value (30, maximum is 255). As I had set up channel 7 and a slider on the transmitter for gyro gain, that was changed to 65 and the slider set to ±35, so gain could be adjusted between 30 and 100 (for all three axes and both gyro modes). After some test flights, the gyro effect seemed still too small and the setup was now changed to 155±100 for a 55 to 255 range. That is practical for flying and usually the slider stays somewhere in the upper part of this range.
On the other hand, maneuverability (reaction to control inputs) had been set to a rather high default value (100, maximum is 255). The airplane felt twitchy especially in the roll axis, but in the pitch and yaw axes as well. After the test flights, this parameter was reduced to values between 30 and 70 as I saw fit depending on axis and gyro mode. That completed the gyro setup for me.
Telemetry
If you read the sections about Performance and Drive below, you may get a clue why I desperately wanted telemetry, both for flight data and for drive data. Fortunately, not many devices are needed since even the receiver sends two values, the GPS all flight data, and the ESC all drive data save two temperatures for which a separate sensor box is used. Here is what I came up with:
Sensor Setup
The Multiplex ROYALpro transmitter can show five pages of three values each in its display, and the whole telemetry can transmit at most 16 values. If I look at the display at all, I want to see three meaningful and associated values, and I don't want to have to scroll through the display pages. So I try to select meaningful values for transmission, arrange them in associated triples, and set meaningful upper and/or lower limits. The trick is this: If one of the limits of a page's values is exceeded or underrun, respectively, the transmitter displays this page, flashes the excess value, and beeps to call attention to it.
The following table is part of a spreadsheet I devised to avoid making a mess out of the telemetry sensor setup. The leftmost column lists the consecutive display line numbers, partitioned in pages of three. The line numbers have to be set as bus addresses (fourth column) in the respective sensor devices, which are listed in the second column. I used 14 of the 16 possible values, arranged in groups of three. Several values have limits set (Alarm column).
It's as well possible to transmit and display certain maximum, minimum, or average values of the actual flight (Options). But all primary values are recorded by the FlightRecorder and evaluated later on a PC, so I don't need that here and left it off. The only value I'd be interested in when flying would be average current draw (amperage). I got to appreciate it when flying my Brummi parkflyer where it is a good indicator for battery-charge-saving flight tactics. Unfortunately, the ESC used here doesn't have this option.
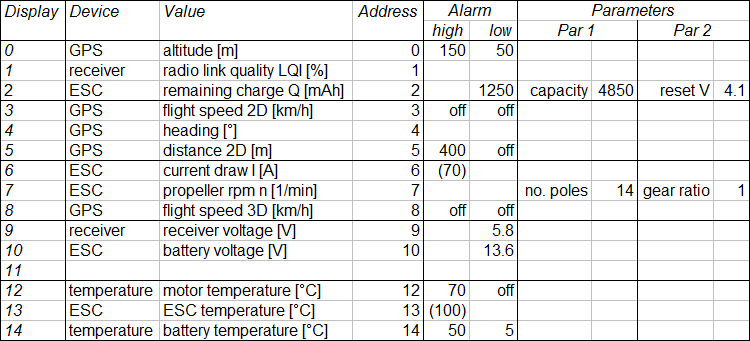
Values 0 to 2 (the first display page) are the most important for safety. I just want to know the model's altitude and want to be notified if it's too high (to avoid full-scale flyers down to 500ft) or too low (to avoid hard to estimate tree tops close to the field). I want to know the radio link quality to see if the model is too far away or just if there are any radio problems. Unfortunately there is no alarm for this value (or it's set by default, I just don't know). Finally, the remaining battery charge should not go below 20% so I want to be warned at 25% (1250 mAh) for landing in good time. And since my definition of a "full" battery is 4.15 V cell voltage (for a longer service life), capacity is set to only 97% of the nominal value (5000 mAh).
Values 3 to 5 are not really important but just nice to know. Flight speed 2D means measured over ground, not implying climb or descent, and of course no wind either. That gives a clue if a "correct" speed is maintained for instance in a difficult traffic pattern. Actually, I would prefer a variometer function, but the GPS doesn't have one. The heading flown is likewise interesting for correct pattern legs (especially downwind) as well as in case the model is far away and hardly visible. That's why I put the distance to the model on this page as well and set a limit to have it indicated. That also helps to stay in the "box" of the flying field.
Values 6 to 8 show how the drive is working right now. All three values are interrelated. Flight speed 3D implies climb or descent but of course still no wind. So it may be quite different from airspeed, which would be actually interesting, but at least it gives a clue. And then again the other two values, current draw (amperage) and propeller rpm, are not that precisely measured, either.
Values 9 and 10 are the voltages seen by the ESC (the battery's) and the receiver (the BEC's). If one of them is too low then something is wrong. Since there is only the drive battery I set quite conservative alarm levels, hoping to never encounter this display page. As a matter of fact, 13.6 V is not far above the level where the ESC's low-voltage cutoff (or power reduction) begins. It may be underrun if full power is set towards the end of a flight.
Values 12 to 14 are the three drive temperatures – motor, ESC, and battery. This display page should as well be shown only in case there's something wrong. Other than for the voltages, I not only hope but even believe (not without reason) that no temperature will exceed the limit – but you never know.
Of course, it is impractical to look at the display when flying the model. One would do that only in case of an alert to check what the matter may be. For a thorough breakdown of a whole flight, all sensor data are recorded in the model by a Multiplex FlightRecorder and analyzed at home with a computer. Even a flight path plot in Google Earth is possible using the GPS location data (see below).
Voice Output
On the other hand, telemetry data can be helpful just during a flight, provided they are prompted to you while you can steadfastly look at the airplane. Enter Souffleur, which means Prompter in English and is Multiplex's telemetry voice-output device. It's great, just look at the web page and maybe also at the manual (in their download section). It's a complement for older transmitters (like mine) while newer ones have voice-output already built in.
It can be set up for three modes, which can be switched by a transmitter channel (I'm using #8). Typically, mode 1 is "silent", meaning only important, safety-related values are notified. Mode 2 may be the "normal" mode in which some interesting values are regularly reported in addition. Mode 3 is actually a "jabber mode" were many or even all of the transmitted values are repeatedly told in predefined time intervals. You see, again the setup has to be carefully planned to avoid making a mess out of it.
Still all can be set to suit oneself, and I chose to do it non-typically. Basically I have a silent mode [1] in which all "alarms" are notified, albeit in different ways. The other two modes additionally tell [2] flight data or [3] drive data, respectively, in two different time intervals.

This is a screenshot of the Souffleur settings. (Unfortunately, it is that small.) I cropped line 15, which is not used here, and the columns for another three possible "Info words", which are not used here either.
Address 0 is highlighted because it's the Altitude value which can be announced every few meters (see 5th column). I chose to have it told every 10 meters. Otherwise it's told once (Alarm single) when the upper or lower alarm levels are passed (set to 150m and 50m, see above). That's enough already so it doesn't need to be told in time intervals. Altitude is spoken for instance as "altitude sixty meters" so anyway no "Info word" (see 6th column) is needed in this case.
Remaining Battery Charge (address 2) is similar to altitude in importance. It's announced once the trigger level (set to 25%, see above) is underrun and additionally every 3 minutes. There is no way to have ordinary values like this announced at certain levels (like altitude). But there are two timers in the Souffleur and I used Timer1 (counting minutes) and set it to 3min. I had the alarm spoken permanently, perhaps so I don't miss a single announcement or just mistakenly, but in any case with bad consequences (see above). The announcement is clearly distinguishable so no Info word is set.
There seems to be no alarm level for Radio Link Quality (address 1) so I chose to have it announced every 30 seconds (Timer2, counting seconds). Again the announcement is clearly distinguishable and no Info word is needed. But this value is told only if transmitter channel 8 (assigned to a three-way switch) is set to "half" (see 3rd and 4th column), meaning mode [2].
You see, one could assign more than one transmitter channel. This way you would have six or even more modes in each of which less values had to be told. Given the time needed to speak out a value of several digits, its unit, and maybe one or more identifying Info words, this could be a good idea. I might try this as long as I don't use the Drop Box so channel 9 is free. On the other hand, voice-output modes could as well be activated with used channels, for instance flaps or power. And both used and unused channels could be or might be switched by flight modes. I had just no idea which would make sense so far...
Channel 8 at "half" activates another three periodic announcements, the flight data Speed 2D, Heading, and Distance 2D (addresses 3 to 5). The latter one is additionally spoken if the model goes beyond the 400m set as trigger level (see above). These values could be confused with other ones of same unit if spoken in sequence so the optional Info words to distinguish them are set. Especially Distance is in correlation to Radio Link Quality, and that's why it's combined with these three flight data values in a single switch setting.
Another three values (addresses 6 to 8) are announced every 30 seconds (Timer2) only if channel 8 is set to "full", meaning mode [3]. These are the most interesting drive variables (Amperage, Rpm, Speed), and the first two of them are permanently told if they are beyond their respective limits (set as specified above). In that case something is wrong and I want to be permanently informed as long as things have not been corrected, what I'm in charge of after all. No Info word is needed because these values are distinguishable from others by their unit. There would have been a minor problem with the first ESC if and when I had used a 5s LiFePO4 what would cause 40A amperage. The ESC seemed to throw an alarm 10% below its limit, so in this case at 36A. During takeoff and climb the alarm would have been persistent. Since I bought the new 70 A ESC after all there is no problem whatsoever now.
The rest are drive variables too, but interesting only in case of a problem, which I don't expect regularly. That's why addresses 9 and 10 as well as addresses 12 to 14 are announced only if their alarm level is underrun or exceeded, respectively. There will be a single announcement if one of the voltages (Receiver or Battery) drops below its limit. More is not needed: There is no hope for a sustained recovery of the BEC voltage. And battery voltage drops (by up to 1.3 V) every time full power is set. Towards the end of a flight, when charge is low, the alarm is triggered. On the other hand, if one of the temperatures (Motor, ESC, Battery) goes beyond its limit, I want to be permanently informed because I'm in charge of correcting that. The voltages as well as the temperatures have to be distinguished from each other by a specifying Info word.
I'm quite taken with Souffleur's potential and I was curious about how the device and my settings would stand the test of practice. It turned out to be quite well and good, but not as interesting as I had expected (or as it is with a glider). While doing the test flights, the recorded data were interesting in retrospect to prove the equipment working safely. The flight data where used in-flight only to check correct trim and the model staying in the field's "flight box". Some of the alarm levels have been adjusted after the test flights. Subsequently, I'm using just the silent mode to get reminders, or warnings in the event of a problem.
Most important are the regular announcements of battery charge and the single announcement of underrunning the low-charge level. Additionally useful is the announcement of battery voltage every time the lower limit is underrun. This happens if takeoffs or climbs are done towards the end of a flight. It reminds to no longer do such things but just putter around until battery charge is really low, and then land. Usually there is no problem, but if the battery has a hiccup, for instance from being discharged too low during a previous flight, the low-voltage warning could set in before the low-charge reminder. After all, the capacity decremented from by the ESC is just a nominal value, and the actual capacity can be lower in such cases. This should be revealed by the low-voltage warning so a safe landing is still possible. And if that happens regularly, it reminds to expect the end of the battery's service life and to set a lower capacity or a higher warning level, respectively, in the ESC's telemetry parameters.
Recorded Data
Here's how the safety-related parameters monitored and recorded in flight turned out to be quite safe after the first flights:
- Radio link quality (LQI) is always 100% – perfect (no third receiver antenna needed).
- The motor draws 37 A from a full battery, 34 A from a half-full one – as predicted.
- Full-power propeller rpm is 4900 at full battery and 4700 at half-full – still within the limits.
- Economic-cruise-power propeller rpm is 2700 at only 7 A current draw – within the limits as well.
- BEC voltage is always between 6.0 and 6.1 V – working fine (old ESC).
- Battery cell voltage drops from 4.15 V to 3.8 V idle, and goes down to 3.5 V under load – just as it should do.
- Motor temperature goes up by about 10°C (18°F) – no problem at all.
- ESC temperature goes up by about 15°C (27°F) – good efficieny, good cooling.
- Battery temperature rises by about 6°C (11°F) in mixed flight (climb/cruise/approach) – marginally.
So regarding telemetry, flying the SrTM+ turned out to be uneventful – just as hoped or expected. There were no real alarms so far, only the desired reminders of too high/low, too fast/slow, or too far away, and running out of battery charge. Just to be safe, I'm using Souffleur's silent mode all the time when flying, and from time to time check the data recorded by the FlightRecorder at home with a computer.
That is particularly useful because only a comparison of various values (for instance amperage, battery voltage, and discharge level) over a whole flight reveals why and when limits are exceeded. Sometimes even GPS 3D location data are useful to interpret the other values by knowing "when" and "where" in the flight as well as horizontal and vertical speed. For instance, it turned out that really the ESC's low-voltage power reduction setting in (somewhat late) let the model touch a bush top (see above as well as here and here). This case is an example how recorded data help analyzing accidents as well as defining and setting the limits and warnings in the telemetry devices. Another good use is routine evaluation of the drive battery's state of health, or age for that matter, and adjusting especially the discharge counter's setup. So maybe half of telemetry's potential would be wasted without the FlightRecorder. The GPS can play an important role as well, especially in case of an accident.
To this end, the FlightRecorder has to be in the airplane even though it's possible to have it connected to the transmitter or the Souffleur voice-output device, respectively. In that case, it would even record the data of all telemetry-equipped models I have, but only once a second and no GPS 3D location data at all. In the airplane, though, general data are recorded ten times a second and the location data twice a second. Only that allows to recognize spikes in some data and interpret some data in the context of the flight data. I find it so valuable that I own three FlightRecorders to leave in models even though they are quite expensive.
 Just to illustrate the data recording, here's a scaled-down diagram
from the LogView
program showing the ESC's amperage and temperature during a test
flight and the following taxi to the parking area (about 7 minutes,
same flight as shown below). Starting temperature is about 26°C
(79°F), maximum is about 41°C (106°F).
Just to illustrate the data recording, here's a scaled-down diagram
from the LogView
program showing the ESC's amperage and temperature during a test
flight and the following taxi to the parking area (about 7 minutes,
same flight as shown below). Starting temperature is about 26°C
(79°F), maximum is about 41°C (106°F).
Of course, temperature (blue) rises as long as full or at least high power (red) is set, and decreases when power is low or even cut. It increases to higher values during taxi and decreases slowly on parking position (the rightmost cusp). Propwash is obviously less cooling than airstream in flight, and after stopping there's virtually no cooling airstream but no heat is produced either.
It's possible to compare several correlated values in one diagram, for instance all three temperatures, amperage and flight speed. There's nothing unexpected or spectacular here, just more and more clutter in the diagram. An example of amperage, battery voltage, and discharge level with a particular application (battery's internal resistance IR) is described in the January 2018 issue of Ken Myers' Ampeer Newsletter. And in the December 2018 issue is an informative investigation of two ill-fated flights with general conclusions regarding LiPo battery characteristics.
Revised versions of both articles as well as a discussion of a GPS's benefits are here at this website. The mishaps in those two ill-fated flights are mentioned above, here and here, and with the next two pictures below. Now if the FlightRecorder could only log all servo channels as well (especially the ESC's is sorely missed), that would be perfect.
Some GPS data are quite useful even during a flight. Especially flight speed is a valuable information even if it's not airspeed. To check if the model is correctly trimmed, I can watch level-flight speed in an up-wind and a downwind leg and take the mean value as an approximation. In climb and descent, the difference between 2D (parallel to the ground) and 3D (in flight direction) speed is clearly shown by the GPS, so the indicated speed values should be quite reliable. Unfortunately, the GPS has no vertical speed indication (variometer), which could be useful to check trim as well (also for climb and glide, not only level flight).
Since we have to fly in a "box" north of the runway and sometimes also have altitude restrictions, distance and altitude values are useful as well. I won't watch the display to stay in the box, but I use the displayed values to check and calibrate my visual impression.
The GPS 3D location (GGA) data, recorded twice a second during flight, are later exported to Google Earth (KML) format with the LogView program on a PC. In Google Earth, the flight path (with flight speed or climb/sink rate as different colors) can be visualized from any viewing angle, including from pilot's position.
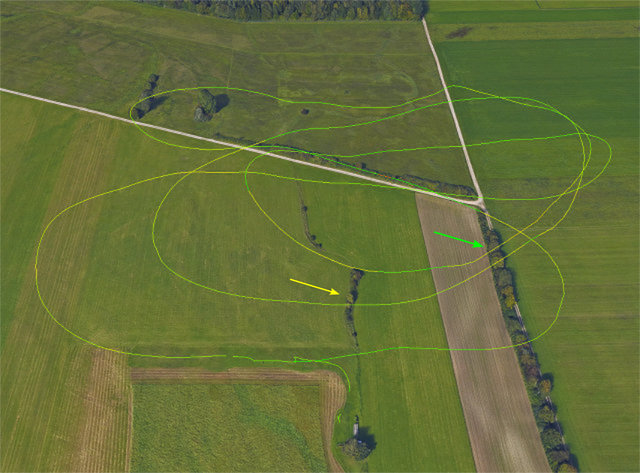 Here's the club's flying field, seen from the south. It's actually a grass
runway amid meadows and fields. From the eastern end runs a mowed path or
"taxiway" southward to the rigging table and a shelter next to
some bushes.
Here's the club's flying field, seen from the south. It's actually a grass
runway amid meadows and fields. From the eastern end runs a mowed path or
"taxiway" southward to the rigging table and a shelter next to
some bushes.
To test mixer setups, I took off eastwards and flew four circles in no specific shape and not at constant altitude. After the full-stop landing, the model was taxied back to the parking area.
The flight and the field are not exactly spectacular, but GPS precision is. I'm amazed that runway, taxiway, and parking area are rendered so accurately. The GPS antenna and its position in the model can't be bad at all.
By the way, the yellow arrow is pointing to the bush that was touched by the SrTM+ in the silly accident described above. And the green arrow is pointing to the tree the SrTM+ sunk into at the end of another ill-fated flight mentioned above.
The next picture shows the same a bit bigger, now as ground view of a spectator standing some 100 m south of the runway. In the foreground are the tree and the bushes hiding shelter and rigging table. They hide the "incriminated" bush north of the eastern runway end as well, but the "receptive" tree more to the northeast is visible here:
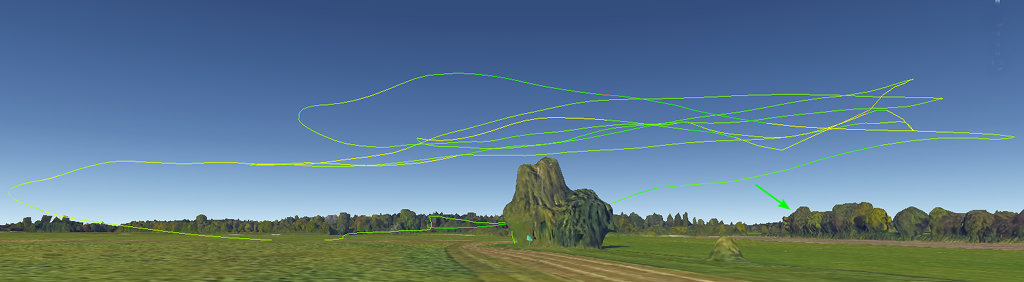
Finally and just out of curiosity, you might have a look at a big picture made from the GPS location data of an everyday, garden-variety flight. Point of view is 200m above the ground, looking to the north. After takeoff, several practice traffic-patterns were done and then, at about 35% remaining charge, a last climb. Then just loitering and coming closer to the ground so there is 20% charge left after landing – commendable. That was just on the day before the silly accident described above when I deeply discharged the battery, so I have no idea what got into me then.
New Sensor Setup
Prior to the 2017 flying season, two new sensors had been inserted into the model's sensor bus. The "True Airspeed and Vario" sensor (see above) and the "LiPo Saver" sensor (see above) should complement or replace some GPS and ESC values, respectively, with better ones. The sensor setup has to match the new configuration, so the planning spreadsheet had been improved and the telemetry setup simply adapted. I went without a complete reshuffle in the first place because I need field experience before I can settle on a proper new arrangement. This first attempt had been set up in the model:
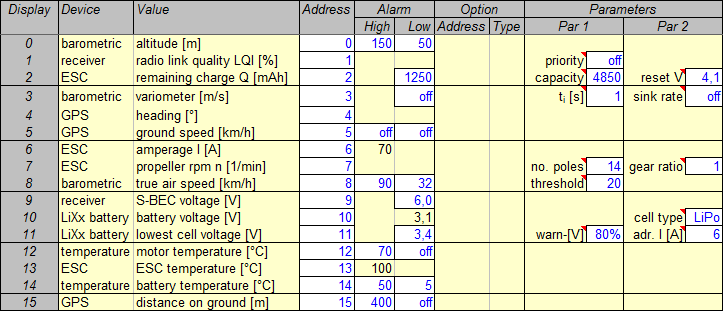
Value 0 is now just a "barometric" altitude value instead of the GPS value.
GPS ground (2D) speed and distance have been sort of relegated from their former places, values 3 and 5. Value 3 is now the "barometric" variometer and value 5 is GPS ground speed. GPS distance is now value 15, which can not be shown on the on-board transmitter display but may be announced by voice output.
Value 8 is now the "barometric" air speed instead of the GPS 3D speed because it is much more useful, especially with a lower limit as kind of a stall warning.
Value 10 is still the total (all-cells) battery voltage, but is now delivered by the new sensor instead of the ESC. Value 11 had been void so far and is now the very useful lowest cell voltage of the drive battery.
Especially the voltage alarm levels had been modified before to avoid voice-output clutter (see above). Then again, new alarm levels have been set for air speed after all because that is sensible now.
That was all – no effort had been spent to find a better arrangement of value triples, for three reasons: First, I don't look at the display very often because most times I would have to scroll and that would detract too much. Second, any "alarm" will automatically show the pertaining value triple, anyway. And third, since I have the Souffleur voice-output device I don't actually need the display.
It has one advantage, though: It shows three values at a glance. That's why it's worth it to think about the value display arrangement in the first place. And that's why I bought the accessory Telemetry Display (see above), which can show even four values at a glance and possibly longer labels. Now the simply adapted arrangement looked awkward when partitioned in quadruples:
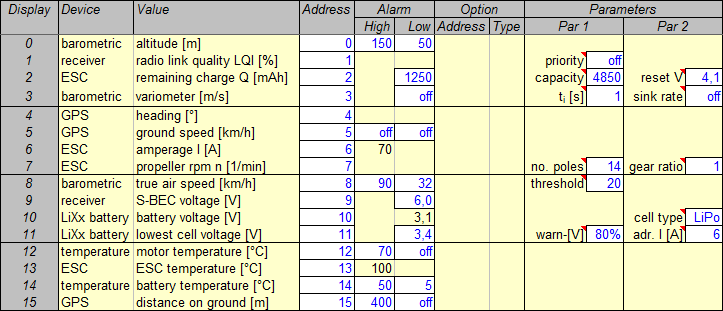
There was not much logic in it, except that the voltages and the temperatures were together in one group, respectively. All other values were more or less scattered over the four display pages. That's how it was shown on the accessory telemetry display, while the on-board display still had its logic so far.
However, it is better the other way around. The on-board display will automatically show pages were an alarm occurs, with the incriminated values highlighted. Which other values are shown is of minor importance. On the other hand, the accessory display is supposed to permanently show a selected set of four associated values. It was of little use as the value partitioning was done in the first place, so I really had to redo it, for instance this way:
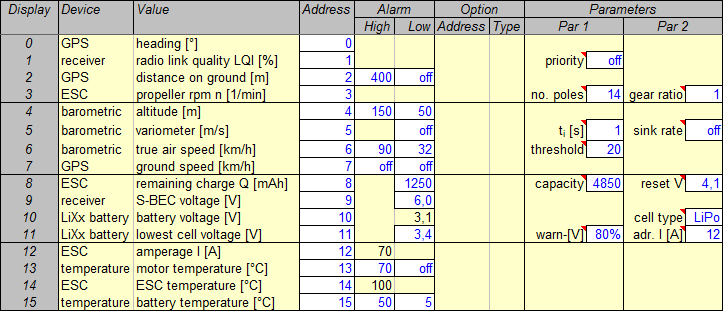
There is some logic in it now: All three voltages as well as all three temperatures are on one page, respectively (third and fourth). The fourth, or better first place on each page is taken by a value that is in close connection to the other three, respectively. After all, remaining charge determines voltage, and amperage determines temperature, at least sort of.
All three "barometric" values are on the second page. Altitude and its rate of change (variometer) take first and second place. Airspeed at third place is complemented by ground speed at fourth place so wind speed may be estimated as their difference.
The first page is more or less a conglomeration of the rest. The receiver instructions say that radio link quality has to be at address 1, but on the other hand they say its address is a parameter. Anyway, it takes the second place here and distance consequentially the third. The places for the other two values are arbitrary.
Actually this had been a draft that had been well pondered to begin with – to avoid disturbing the whole setup. After all there are other ways of arrangement that are logical as well. In the end, this arrangement proved to be not perfect but useful. Different arrangements would be not better for flying the model and monitoring its equipment, and arbitrary combinations of values can be done post-flight when analyzing the recorded data. So I just stuck to this arrangement and set it up in late August 2017. Since then (till September 2018), only a few alarm levels have been adapted:
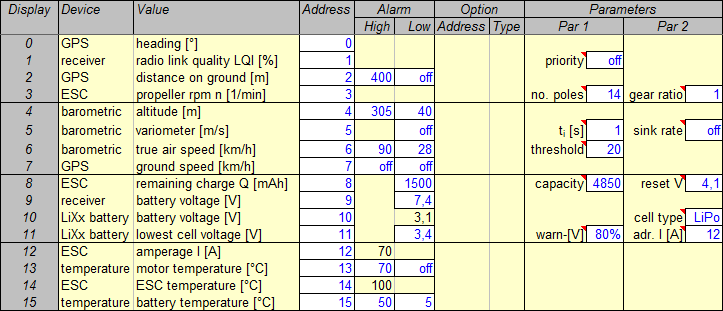
50 meters low altitude warning was too high, 40 meters is enough to avoid obstacles and to have a good landing approach. 150 meters high altitude warning was too low, 305 meters (1000 ft) as the lower limit of Class E airspace is really important.
32 km/h stall speed warning turned out to be overcautious. 28 km/h gives room for airspeed fluctuations especially in thermals and thus avoids voice-output clutter. Landing approaches are done with flaps so the lower warning level is still safe.
A warning at 25% remaining charge (1250 mAh) is already tight for the
aging drive battery. 30% (1500 mAh) is really a warning level now, and
it could be 36% (1800 mAh) soon.
Follow-up: It was, even before I had set the new level, and the battery
finally failed (in September 2018). With a new battery, yet 30% (1500 mAh)
has been left unchanged (not lowered to 25% again) because 10% reserve (to the
20% lower limit) turned out to be needed for a safe return to the runway even
in a difficult situation.
The receiver voltage warning level had been 6.0 V. However, the S-BEC's target value had been raised to 6.4 V to compensate for the S-BEC's voltage instability and to have 6.0 V at least. With a receiver battery replacing the S-BEC, the warning level was set to 7.4 V what is pretty conservative for a 2s LiPo battery.
New Voice Output
Grouping of values for voice output is different from grouping for a transmitter display. It is independent of value addresses and can be done arbitrarily by assigning transmitter switch positions, so the special telemetry display is of no concern here. Since the telemetry setup had been just modified to begin with, the voice-output setup had to be just modified correspondingly. Here are the old and new Souffleur settings for comparison:
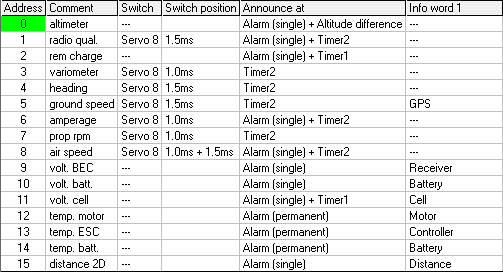
Address 0 is still highlighted green because it's the altitude value and should be announced every 10 meters. Now it's just a "barometric" value and no longer a GPS value.
Address 3 could have been highlighted blue but it's not. It's the variometer value and could be rendered as a variable tone. But I prefer to have it spoken because I'm interested in the absolute value. It's a "barometric" value as well and new in this setup.
Speed 2D has been displaced to address 5 and is now called ground speed – as opposed to air speed. It got the info word GPS to tell them apart.
Distance 2D as the least important of all values has been displaced to address 15, which is not shown on the transmitter display. And it was downgraded to a mere reminder.
Air speed at address 8 is a "barometric" value and as such a better replacement for the speed 3D GPS value. Now it's sensible to set alarms, particularly for minimum speed – kind of a stall warning.
Lowest cell voltage at address 11 is new, and it's another indicator for low battery charge. It's so useful that it is even announced every 3 minutes, together with the remaining-charge value.
The modes [2] for flight data and [3] for drive data have been slightly reorganized. In mode [2], distance 2D was replaced by air speed, so now air and ground speed can be compared to have an estimate for wind speed.
In mode [3], speed 3D (ground speed) has been replaced with air speed and variometer has been added. Now it's finally possible to see (or actually hear) how the drive's power is turned into the airplane's climb.
By the way, the term Servo in the table's Switch column is misleading if the WingStabi flight stabilizer is used. Actually, channel 8 is used to switch Souffleur modes and not servo port 8, which is a different thing and is now used for the second elevator servo.
You may notice that three permanent alarms have been changed to single ones. That has been done in seeking to avoid voice output clutter and was needed all the more as even two alarms have been added. This measure was in addition to modifying the alarm levels to get fewer alarms or reminders, respectively (see above).
After the sensor setup had been merely rearranged for the accessory Telemetry Display, the voice-output setup had to be rearranged as well:
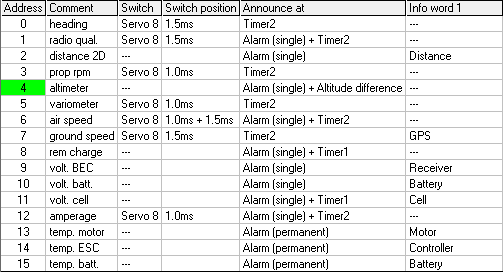
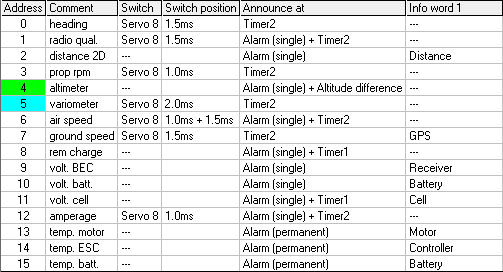
The grouping of Souffleur value announcements by position of switch 8 had turned out to be convenient, so it was left unchanged. The list was just re-sorted to the new address order (first picture).
Later, some of the warning levels in the sensor setup have been adapted. That didn't affect the voice-output setup but has been done to reduce voice-output clutter. The Souffleur precedes each warning with the word "attention" to emphasize it and to distinguish it from periodical announcements. That makes warnings substantially longer so they should be reduced to a minimum.
One thing has been adapted in the voice-output setup: the variometer output (second picture). Value 5 was not denoted as variometer so far so the Souffleur did no tone output. The transmitter recognizes variometer values, though, and does a tone output (with its buzzer) as long as the Souffleur doesn't (quite clever). Now I chose to activate the Souffleur's tone output in its "silent" mode to relieve my club mates from the transmitter's tone output. In the other two modes, Souffleur's tone output would be too much for me but they are rarely used, anyway. I like it in normal (silent) mode because I do a lot of thermalling with the SrTM+ now.
Calculations:
Performance
For me, far more than half of the fun of modeling is pondering, calculating, and simulating models. Of course I wanted to know in advance how the new SrTM+ would perform and try it "virtually" in the model flying simulator. Even though such calculations are not more than mere estimates, they are quite educated ones and surely fun.
The calculations are not as "selective" as to compute the best suitable drive, and maybe that's not possible at all. But there are not that many options for a drive (for propeller, motor, and battery), anyway, so it's only about comparing the options and choosing one of them. Here are the results for the drive consisting of the 17x12E propeller, 360 kv motor, and 4s 5000mAh LiPo battery (at 3.7V nominal cell voltage), which I didn't even choose deliberately but which happen to be virtually perfect.
The following diagram is a synopsis of the performance calculations. It shows several parameters dependent on flight speed, here in meters per second. Most characteristic are 12m/s (27mph, 43km/h) for economic cruise, 15m/s (34mph, 54km/h) for best climb as well as fast cruise, and 24m/s (54mph, 86km/h) for maximum level speed.
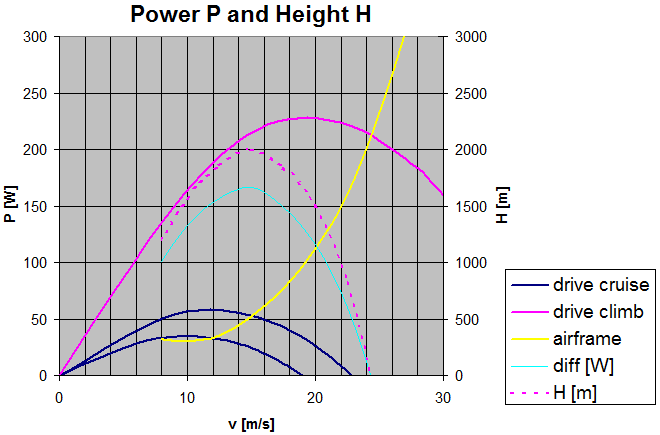
The consideration starts with the yellow line, which shows the airframe's power requirement to overcome the aerodynamic drag. It may surprise you that only 30 Watts minimum are required and still only 35W at economic cruise speed. Drag increases with airspeed squared, and that's why this power requirement is a parabolic graph. At best-climb speed, which has been chosen as fast-cruise speed as well, required power is 52W already, and at maximum level speed it's even 212W.
The next line to consider is the continuous magenta one, showing the propulsion power delivered by the drive at full-power setting. That is not the electric power "in", which may be at its peak statically, at zero airspeed. This is the aerodynamic power "out", simply thrust times airspeed, so its static value is zero. Drive power reaches a 230W maximum at 19m/s (44mph, 68km/h) but that is meaningless. Somewhat meaningful is the maximum-level-speed drive power, which is obviously equal to the power required by the airframe at that speed.
The difference between the drive-thrust power available and the airframe-drag power required is the power left to lift the airplane, or climb power. It's shown by the light-blue line, which spans the airplane's speed range from stall speed to maximum level speed. Over the better part of this range, there is considarably more power available than needed to overcome drag. Because its flight speed is low, even the draggy SrTM+ needs not much power for level flight. Or, generally speaking, the airplane's power requirement is mainly determined by climb. At best climb speed, only ¼ of the propulsion power is needed for drag so ¾ can be used for climb.
It may surprise you that best (most effective as well as efficient) climb is at considerably higher speed than economic level flight, but it's simply about "halfway" between the speeds of minimum drag power and maximum thrust power. It's neither an airframe characteristic nor a drive property, but a mix of both. Taking the battery's (nominal) 5000mAh capacity into account, the airplane will get at 2000m (6500ft) altitude as shown by the dotted magenta line. Of course this is a theoretical (comparative) value, and you would have to maintain the counterintuitive 34mph (54km/h) airspeed quite accurately. Advantage for telemetry...
While the magenta line shows the drive power at full-power setting of the ESC, the lower dark-blue line shows it at a cruise-power setting of about 50% (throttle stick position / motor voltage) that I chose intentionally to get the point of intersection shown in the diagram. 12m/s (27mph, 43km/h) level-flight speed is not a natural value like minimum-drag speed, which would be 9.5m/s (21mph, 34km/h), or like minimum-power speed, which would be even a tad lower. Instead it's arbitrarily chosen a bit bigger to have some speed stability after all. That means if airspeed is reduced for some reason, thrust power will become bigger than drag power and the airplane will accelerate back to equilibrium speed. For increased airspeed it's vice versa. This is still a theoretical value since it will only work in straight and level flight. Any turn will need more lift, making for more drag (especially at such low speed) and thus requiring more drive power. This speed can be seen as a barely practical minimum, or economic cruise-speed.
As a complement, the upper dark-blue line represents a power setting of about 60% for something like a maximum, or fast cruise-speed, deliberately chosen to be the same as the – counterintuitively big – best climb speed (15m/s, 34mph, 54km/h). This speed is yet not uneconomic but a lot more practical. Turns can be done without increasing power and still without coming close to a stall, simply because speed gets only slightly lower and is safely above the realm of big drag or even stall. The level of speed stability is much higher, meaning a small reduction of flight speed will cause a big difference between thrust and drag power and the airplane will accelerate back to equilibrium speed in no time. And you can easily switch from cruise to climb and back by changing power setting and pitch attitude while maintaining speed. (That's the reason why fast cruise speed was chosen to be the same as best climb speed.)
The yellow drag-power line ends at 8m/s (18mph, 29km/h) what is a pretty good estimate for stall speed. So 12m/s economic cruise-speed is 1.5 times stall speed, a ratio that is a rule of thumb for landing approach. Nobody would actually fly that slow in cruise; now we just have a good explanation why: There's still very little speed stability below that point so flying level requires working the throttle and is unpleasant. On landing approach, though, speed is controlled by elevator and and glide slope by throttle, so this kind of speed stability is of little concern.
Merely 1.3 times stall speed is a rule of thumb for final landing approach, and that would be 10.4m/s (23mph, 37km/h) in this case. Again we have an explanation now: It's pretty much the speed of minimum drag. Even if some (thrust-)power is still set (the minimum to keep the airplane afloat), there is speed instability now. Lower speed will make for even lower speed, so pulling some up elevator won't make for any "ballooning" but for the airplane settling on the ground, what is really pleasant for landing.
Then again, 15m/s (34mph, 54km/h) fast cruise-speed is about 1.9 times stall speed but is still not really fast for a sturdy model like this one. It's still slower than maneuvering speed, that is the highest speed at which the wing can't be broken by maximum lift. At fast cruise speed, the wing load factor (maximum-lift/weight) is only 3.75 but I would expect considerably more, let's say something like 10, as tolerable wing load factor for this sturdy model. That would mean 25m/s (56mph, 90km/h) maneuvering speed, what is even slightly more than maximum level speed.
Finally, we can take this 24m/s (54mph, 86km/h) maximum level speed as the highest possible level flight speed. Its lowest counterpart would be the 12m/s (27mph, 43km/h) economic cruise-speed. Lower speeds are possible but not practical for the reasons mentioned in the previous paragraphs. Both speeds are not really practical, either; they are just upper and lower limit of the airplane's speed range. Their ratio happens to be the nice round number 2:1 what is not too bad for this draggy airplane.
So much about characteristic speeds (with flaps retracted) to begin with. Even though all these values are mere estimates, and on top of that even theoretical, they are quite useful to get the gist of the performance matter and to get you in the ballpark. So let's continue...

A polar diagram is a traditional way to correlate two values of the same
kind to each other, two speeds in this case. Horizontal (flight) speed is
outlined at the horizontal axis, vertical (climb) speed at the vertical
axis, so the diagram is quite intuitive (even though the axes are not
equally scaled).
The graph is essentially the same as the light-blue one shown above, it's just not climb power but climb rate. So you see that the most efficient and effective, that is the fastest climb at about 15m/s (34mph, 54km/h) airspeed, gives a 3.75m/s (740fpm, 225m/min) climb rate. This proves that the model is not underpowered (what many modelers might think); after all it means a quite steep 1:4 slope. The steepest climb would be at 10m/s (23mph, 36km/h) with a 3m/s (600fpm, 180m/min) climb rate, but it's not much steeper (1:3.3) and not as economic (only 1600m altitude instead of 2000m, 20% less).
In practice, both values are even lower limits. After all the nominal battery voltage (3.7V per cell) used for the calculations is reached only after discharging down to about 20% remaining charge, what is the conventional discharge limit determining flight duration. So, due to higher in-flight battery voltage, climb rates are actually higher than calculated.
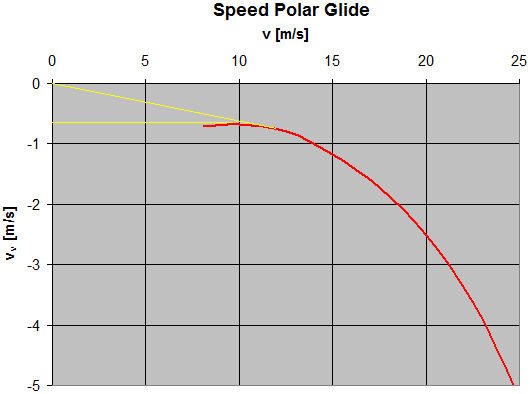
This polar diagram shows characteristics of the airframe only, not the
drive, so the vertical speed is sink speed in glide. This kind of diagram
is customary in describing glider performance, but it's useful for powered
airplanes as well, especially Telemasters which should glide quite well.
If you ever encounter a "dead stick", you should glide the airplane at about 12.5m/s (28mph, 45km/h) for shallowest glide slope (1:16). That will maximize the distance over ground and the model may reach the runway. If you want to thermal the SrTM+, you should do that at 10m/s (22mph, 36km/h) to minimize sink rate. Well, 0.65m/s (130fpm, 39m/min) in that case isn't exactly slow sinking and would be bad for a glider (though the slope is still 1:15), but the model could make up for that by the slow airspeed and thus tight turns in thermals (even tighter with flaps and ailerons drooping a bit, like a real thermal glider). Then again, SrTM+ is actually too heavy for this. Too bad...
Drive
You may be incredulous about how such a huge model like the SrTM+ can be flown at all with only 35W power. Of course I could be mistaken in my calculations, but I'm not in the habit of doing so. I'll just try to show you how I came up with the performance data. Enter the drive:
Full Power
Imagine the throttle stick is in its forward position, the model stands still and the propeller develops static thrust, requiring a certain electric power drawn by the motor. Now the model accelerates, for whatever reason, until thrust is zero, meaning the propeller is at its "pitch speed" requiring power only to overcome its drag, which is torque. In the following diagrams, several power and efficiency values are plotted over this speed range from zero to nearly 40m/s (90mph, 144km/h). In the next two diagrams, the speed of best climb (15ms, 34mph, 54km/h) is highlighted by vertical lines of different color.

The yellow line is the same as the magenta line in the diagram above, thrust-power (thrust times speed). At first it's zero because speed is zero, and finally it's zero because thrust is zero at 38.5m/s (86mph, 139km/h).
Thrust is the light green line, which is most remarkable because it's straight above about 15m/s, meaning thrust is inversely proportional to speed there. That's a property of electric drives but not exactly obvious. Below a certain speed, about 15m/s (34mph, 54km/h) in this case, the propeller blades begin to stall partly and progressively, giving more drag and less thrust. That's why thrust-power, and the other power values as well, aren't inverted cubic parabolas there whereas they (roughly) are above that speed.
Incidentally, all values below this speed are especially unreliable. The propeller coefficients are not measured but calculated with Martin Hepperle's great JavaProp applet/program. It's virtually impossible to calculate reliable aerodynamic coefficients in the realm of stall. That's not a problem, though, since we don't need to know static thrust exactly (and the calculated value is not too bad either).
But we do need reliable values for economic climb and cruise. Fortunately, these are outside the speed range where noticeable blade stall occurs. That is an asset of the APC E prop, whereas not all props out there seem to have a speed range free of blade stall at all. Besides, this propeller is quite big so it is not heavily loaded (its prop-disk loading by power/thrust is quite low) what is a precondition for avoiding blade stall.
Moment, read torque (but T is already assigned to thrust), is the dark green line, which decreases progressively above about 15m/s. That is because (1) thrust decreases linearly and (2) the propeller turns progressively faster (next diagram) so less torque is needed to generate the thrust. That makes again for an inverted parabola in the realm of full propeller "grip". Below 15m/s, the prop loses more and more "grip" to progressing blade stall so torque comes close to a straight horizontal line there.
That holds for the orange line as well because mechanical power is torque times rpm. That is the power the motor has to deliver to the propeller, and an electric motor draws current proportional to the torque produced. That's why also the blue line, amperage, has the same shape as the dark green one. And since we assume the throttle stick on the transmitter being fully forward all along (meaning constant full voltage), even the red line, electric power, has the same shape because it is simply voltage times amperage.
Now you see that this is even a 500 Watt drive after all. It might still seem too weak for the big model, but that has been disproved above (mind climb rate). The model's power-to-weight ratio (50 W/lb) as well as its Wing Cube Loading (5.7 oz/cu.ft) would qualify it as a so-called Park Flyer or even Slow Flyer (see Ken Myers' Electric Flight Basics) – if it were not so big. (Its WCL would qualify it more aptly as a "slow and relaxed trainer".) This airplane is indeed big and heavy, yet it has a low wing loading and flies quite slowly. Although thrust is big, speed is not, making for a moderate power requirement. Add to that the efficient electric drive (see below) and you see why 500W "in" are well enough. Of course, 650W with a 5s LiFePO4 battery or even 900W with a 5s LiPo wouldn't hurt either (or 1100W with a 6s LiPo but a 17x10E propeller instead of the 17x12E).
The drive will never draw more than 35A, not even static. On the other hand, 33A will be drawn in an economic climb what is not much less – so much about "unloading". A "small" ESC, which can stand only bursts of amperage that high would be useless because a sustained climb lasts longer. Tightly sized ESC's are for airplanes which need only short bursts of full power (for instance pattern planes). With a 5s LiFePO4 battery, the drive would draw 40A static as well as in economic climb, and 48/47A with a 5s LiPo (as well as with a 6S LiPo and a 17x12E prop). In these cases, a 40A ESC would not be sufficient, the more so as a fully charged battery has substantially more voltage (up to 4.2V per cell) than the nominal value (3.7V) used in the calculations so amperage will be even higher (41A with the 4s LiPo). In any case though, the motor is safely in its 60A-for-1-minute limit (even if just barely with a 6s LiPo: 58A).
Finally you see that static thrust will be something like 18 Newton (4lbf) giving 0.4 static thrust/weight ratio. That might seem quite little but again remember what kind of model we are talking about. It just doesn't take that much time and roll distance to accelerate it to its low takeoff speed. This drive won't let the airplane leap off the ground, but it's well sufficient even for STOL (Short Take-Off and Landing).
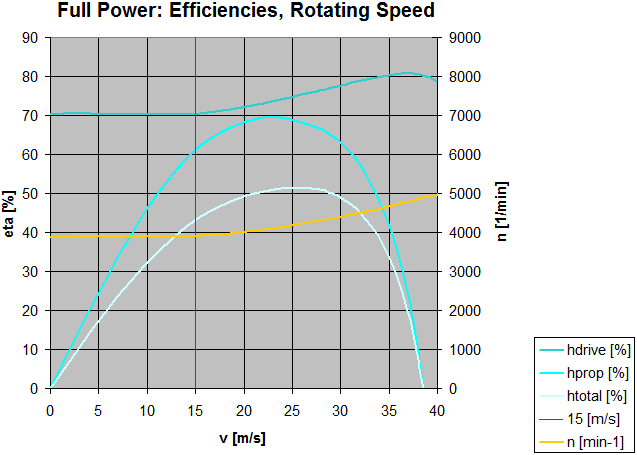
And it's efficient as well! The topmost, darkest-blue line in this diagram is "drive" efficiency, which seems to be actually bad for a brushless outrunner. But "drive" includes the resistance of not only motor, but also battery, ESC, leads, and connectors. On a top-charged 6s LiPo, the motor alone would go up to 1500W (for one minute at 60A) and have 88% peak efficiency. What is not told in ads and not even in specifications: With any motor, this peak efficiency is reached only at high rotating speed and correspondingly marginal power. (It's just a comparative value.) In this case, the topmost line shows that the whole drive still has a good 81% peak efficiency, but only at 37m/s (83mph, 133km/h) flight speed. That is much more than the 24m/s (54mph, 86km/h) maximum level speed, so it's a fast dive and is useless.
Anyway, at economic climb speed the drive's efficiency is merely just over 70% in this case. That is partly made up for by the propeller. The medium-blue line is its efficiency, which is thrust-power devided by mechanical power. Therefore, it's zero at zero speed (despite big static thrust) and at "pitch speed" (zero thrust by definition). There's only a small speed range where prop efficiency is good, but nearly 70% is really good. That is achieved by the propeller's big size (low disk loading) and high pitch (slow rotational speed) as well as by its good design.
Unfortunately, economic climb speed is not in that range. Even worse, if both efficiencies are combined (multiplied by each other) the peak value is at an even higher speed (26m/s, 58mph, 94km/h compared to 23m/s, 51mph, 83km/h), see the light-blue line. So at economic climb speed, total efficiency is "only" 43%, but that isn't bad at all! After all it includes all losses from the battery to the propeller, and there are many inferior drives for sure.
This one is optimal for cruise flight (see below). For a mission like dropping R/C skydivers for instance, where only climb and descent occur, perhaps a 19x7.5 prop would be better. Even a 17x10 could be better than this 17x12. But there would be no viable cruise speed, what would be bad because SrTM+ is not a 3D airplane that can hang on the prop.
Remark
There was a practical solution to this problem, a propeller hub made by Kavan (designed by Carl Schwab, see also here) that switches pitch automatically between low for climb and high for cruise. Obviously, prop diameter can't be changed in flight, but at least the pitch could be reduced for best prop efficiency at climb speed. In the diagram, it looks like that might improve the drive's overall efficiency by about 20% (from 43% to 52%) after all. However, turning the blades to less pitch (at least in Martin Hepperle's JavaProp program) will indeed shift peak efficiency to climb speed, but at the same time worsen this peak efficiency just to the value achieved with the original pitch (43%), anyway. So perhaps, giving virtually no efficiency gain, the hub was useless. Then, it was expensive and got discontinued.
The hub could be useful if there would be 17" propellers with even more pitch than the 17x12, for instance a 17x15. Coming close to a "square" propeller (17x17), it tends to have higher peak efficiency than fine-pitch variants (like the 17x10). Reducing its pitch would reduce its peak efficiency not so much. It would require an even lower-kv motor, which would be even bigger and weigh even more, though. Better would be a smaller motor with a reduction gear, which would be expensive like the hub. While that could be even practicable, there is no such propeller. There are 17" folding-prop blades (apposite to the hub), but no "near-square" 17x15 or 17x16, only "over-square" 17x18 meant for F5B, that is actually for racing and rather not suited for the SrTM+. (Too many "would" and "could", so disregard!)
Let's finally look at the orange line, which is propeller rpm. It's just interesting and worth noting that there are again two distinct speed ranges that happen to be divided by economic climb speed. At lower speeds, the drive spins at nearly 4000rpm as long as there is some prop blade stall. At higher speeds it "unloads" progressively up to 5000rpm, that is by about 25%. Yet this may be less than you might have expected, and it's at a speed achievable only in a dive. At maximum level speed the "unload" is merely about 6%, and at the speed you will want to fly with full power – economic climb speed – there's no "unload" at all.
What you might not have expected as well is the drive's sound: It's not the ear-piercing screaming typical for many electric models today, but rather a sonorous low-key hum matching the stout airplane the SrTM+ is (and perhaps largely coming from the big airframe acting as a resonating body).
Economic Cruise Power
Imagine the throttle stick on the transmitter set only halfway forward, all else the same: The model accelerates from static to "pitch speed", but this speed is now only half as big as before. Reducing throttle is like reducing motor voltage (at least sort of) so it's half voltage and, by the kv value which is rpm per Volt, half rpm. Half throttle (48% to be precise) happens to be the setting required to keep the airplane afloat at 12m/s (27mph, 43km/h). I had chosen this as economic cruise speed to have a minimum of speed stability (see above), and it's highlighted in the following two diagrams. By the way, with a battery having more voltage than the 4s LiPo (for instance a 5s LiFePO4 or even 5s LiPo) the power setting would have to be lower (44% or 39%, respectively) to get just the same motor voltage and power (but 40% with a 6s LiPo and a 17x10E propeller instead of the 17x12E).
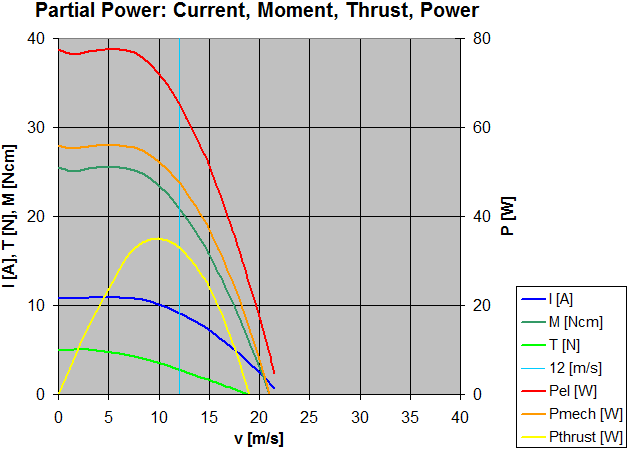
Cruise is a flight mode "aerodynamically" different from climb. So the characteristic speed in this case (12m/s) is not half the former one (15m/s) but reduced by only 20%. That's why it's now bigger than the speed of peak thrust-power (which as a drive characteristic is halved) rather than smaller. It's all a lot easier on the drive.
Static is actually not interesting now, except to see that static thrust is only 5N (1.1lbf) instead of 18N (4lbf). That is a 0.1 thrust/weight ratio, only a quarter of the full-power ratio and not enough for anything sensible. Electric power is all below 80W, only 15% of the more than 500W at full-power setting. Amperage will be not more than 11A instead of 35A, so there should be no temperature problem whatsoever if only the ESC is able to work at partial-power setting for some time (what modern ESCs are).
At economic cruise speed, thrust is only 2.75N (0.62lbf/10ozf); that's obviously just enough to pull the airplane and keep it afloat. Electric power is only 65W and thrust power 35W as mentioned above. The cruise-power setting (48%) was intentionally chosen (by trial and error) to make the drive's thrust power equal to the airframe's drag power requirement. Amperage is 9.2A what means more than 30 minutes maximum flight time with a 5000mAh battery. Of course, this is a "theoretical" value because you won't use up the nominal capacity to be easy on the battery.
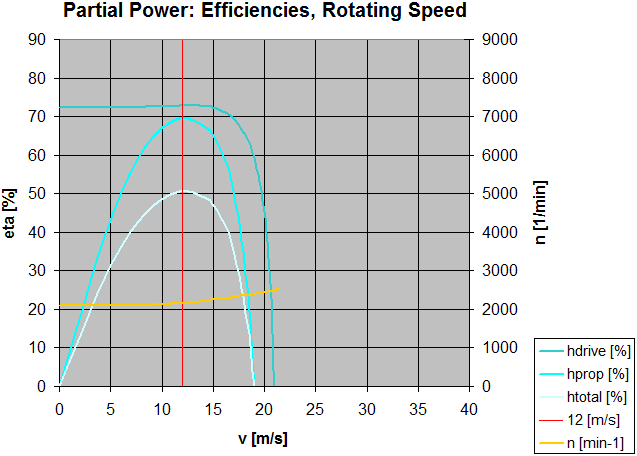
That's a happy optimum! Not always motor, propeller, and airplane match that well. For instance, the drive recommended by Hobby Express (17x10 prop, 380 kv motor, 5s LiPo battery) would have its peak efficiency at very slightly lower, meaning too low speed. And, because such low-pitch props are less efficient than higher-pitch props in any case (however well-made they are), it would have about 5% less peak effiency, and hence the whole drive 3.5% less. But maybe I'm splitting hairs again...
Anyway, the motor is close to its peak efficiency at this small load, even though this peak efficiency is not that high at this low power setting (voltage). The propeller is at its peak efficiency exactly at this cruise speed, and it's the very good 70% value assumed here no matter what load (for simplicity, actually should be a few percent lower for the lower rotational speed). Both combined give a spectacular 50% what means that only half of the battery's energy (the other 50%) is dissipated. That is quite a little, and that's what made electric flight practicable in the first place.
Even better: The propeller spins at only 2150rpm – silently. Electric flight is, or at least once was, called silent flight, and that helped its proliferation because it could be done nearly everywhere. Actually, the drive is so silent that there is no audible feedback for power setting in flight, something that may even need getting used to.
Fast Cruise Power
Finally, imagine the throttle stick on the transmitter set about 60% forward (58% to be precise), again all else the same, and the model accelerates from static to "pitch speed". This power setting had been chosen to make not for a minimum, or economic cruise speed but rather for a more practical, 15m/s (34mph, 54km/h) fast cruise speed. This is now highlighted in the following two diagrams. And again with a battery having more voltage than the 4s LiPo (5s LiFePO4 or 5s LiPo), the power setting would have to be lower (52% or 47%, respectively) to get just the same motor voltage and power (but 48% with a 6s LiPo and a 17x10E propeller instead of the 17x12E).
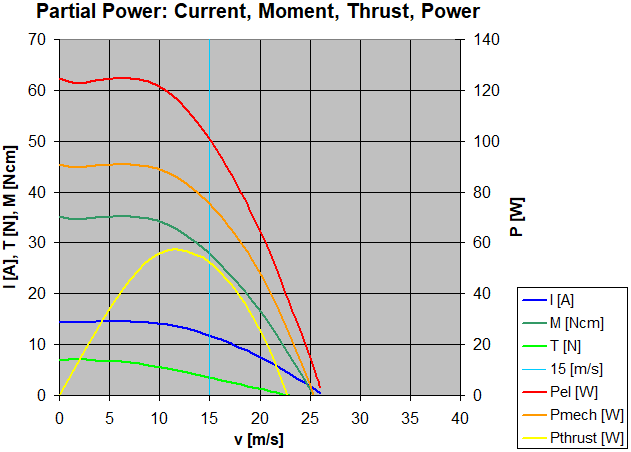
Even though all values are substantially bigger than in the previous case (economic cruise), the characteristic speed in this case (15m/s) is still bigger than the speed of peak thrust-power, so it's still all easy on the drive.
Static (zero speed) thrust is 7N (1.6lbf) instead of 5N (1.1lbf). That is a 0.15 (0.1) thrust/weight ratio, still only 37% (25%) of the full-power ratio. Electric power is all below 125W (80W), only 25% (15%) of the more than 500W at full-power setting. Amperage will be not more than 15A (11A) instead of 35A, so there should be still no temperature problem.
At fast cruise speed, thrust is 3.5N (0.8lbf/12.6ozf) instead of 2.75N (0.62lbf/10ozf) at economic cruise speed. That's the thrust needed to overcome aerodynamic drag at this speed, which is (intentionally) the same as economic climb speed. At this speed, full-power thrust is 14.3N (3.2lbf/51ozf) so only 25% of this thrust is needed for drag and 75% is left for climb. That explains why it's not worth it to make the model "slicker", particularly as any measure to reduce drag could increase weight and hence require more climb power (as various similar-configuration "scale" models show).
Electric power is only 100W (65W) and thrust power 52W (35W) at this 58% (48%) cruise-power setting. Amperage is 11.8A (9.2A) what means still 25 (30) minutes maximum flight time with the 5000mAh battery. Of course, this is a "theoretical" value because it doesn't take account of take-off and climb and because you won't use up the nominal capacity to be easy on the battery. Maybe surprisingly, take-off/climb and descent/landing usually even out. So simply if you want to have 20% charge left in the battery, 20 minutes maximum flight time would be the safe practical value in this case (provided the battery's capacity is really 5000mAh and not less, what it usually is due to less-than-full charge, age, damage, or even "optimistic" specification).
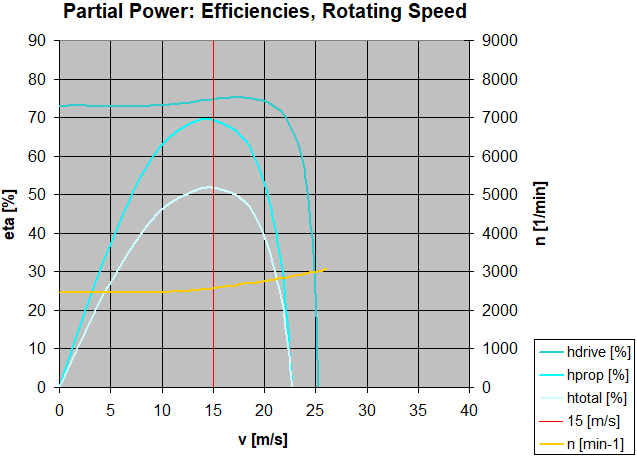
That's still a happy optimum! The airplane, the 360 kv motor, and the 17x12E propeller just match very well, regardless of cruise power setting (and regardless of 4s or 5s LiPo battery, for that matter). The 17x10E prop would be just not quite as good.
The motor is not quite as close to its peak efficiency now, but this peak efficiency is higher at this higher power setting (voltage). The propeller is still close to its peak efficiency (70%, should be slightly lower for lower rpm) so both combined give again the spectacular 50% overall efficiency.
At 2600rpm (2150rpm), the propeller spins still so silently that there is an audible feedback for power setting only when flying close by. Again advantage for telemetry...
Real Power
The calculations discussed above may seem too good to be true, and in a sense that is even so. However, this is meant as a showcase and it would detract from its value if I'd renounce it and replace the ideal values by the real ones. Then, I have no practical interest in correcting my calculations. They have been done beforehand and "quick and dirty" to be sure about the drive's suitability and to have a reasonably realistic simulator model in the first place. Only later they turned out to be a perfect showcase example for modern electric drives.
Then again, it would be no problem to calibrate the calculations. Telemetry data like voltage, amperage, and RPM are good enough to achieve reasonable accuracy. I even measured static thrust with a spring scale. The static values sufficed to feel safe for the maiden flight, and the in-flight telemetry data proved that all is in good order. You may be interested in hearing that static thrust and all amperage values were even dead-on. All RPM values were off by up to 30%, though. That might be due to unreliable propeller calculations, unknown impedance values for battery and ESC, the motor's actual kv value differing from the specified one, and the motor timing done by the ESC changing the apparent kv – or simply me doing the propeller calculations too "quick and dirty".
These are actually hard to do correctly, but I took only coarse front and side pictures of the propeller and rashly used Martin Hepperle's tools to calculate geometry and coefficients (links see below). APC, the propeller manufacturer, carefully used an even more sophisticated calculation tool. Yet my results are in some ways congruent to theirs but differ in some other ways (most notably, theirs predict less amperage than I measured in reality). The famous Michael Selig had one of his postgraduates take pictures for geometry data and even measure the propeller in a wind tunnel getting results again differing in some ways. (Links see below.)
By all means, calibrating the calculations could just mean knowing values closer to the real ones – but to what end? So let's just spare us spoiling the perfect prototypical example, for we would spoil it by making it more true to the special case at hand.
More
If you want information about the Senior Telemaster Plus (or even the other Telemaster variants), the Senior Telemaster Plus web page by Hobby Express is the proper source or starting point, respectively. You may follow the links in "Everything You Need" to get specifications of the recommended R/C and drive components.
They had three videos related to the SrTM+ at YouTube (all removed now): The advertizing video showing a dynamically flying SrTM+, the instructions how to fix a twisted fuselage with a covering iron, and the illustration of the Drop Box and its operation.
There is a comprehensive and informative review at RC Groups from 2011, including a good demonstration flight video. As well at RC Groups is interesting information about the SrTM V2 setup/trim, which is different from that of the "old" SrTM and seems to be SrTM+'s as well (see above).
If you are interested in Multiplex products, their transmitters with special mixer characteristics, their dual receivers, their telemetry devices, ESCs, or even their models, you may visit the German Multiplex web site. Look not only for the product descriptions but also for the product manuals in the Downloads section, they have separate English versions or an English version in the same PDF file.
I used the Linkage Design spreadsheets by Blaine K. Beron-Rawdon to calculate the characteristics of the rudder, elevator, aileron, and flap linkages. That's not necessary but surely fun, particularly since the tool is very capable and very reasonably priced. Worth a look...
To know the flight performance and have a realistic simulator model in advance, the PropellerScanner program as well as the JavaProp applet/program by Martin Hepperle and my own calculation spreadsheets have been used. You may get all the related files at my download page or directly here. The PropellerScanner and JavaProp files for the propeller are here, and the spreadsheets for the whole drive are here. There are even three drive calculations to compare: the actual drive with 360 kv motor, 17x12E propeller, and 4s LiPo battery; the same with a 5s LiFePO4 battery; and the same motor with a 17x10E propeller and a 5s LiPo battery, as recommended by Hobby Express.
Two calculations have been added for the first drive configuration: one using the manufacturer's calculated propeller coefficients, and one using Michael Selig's measured coefficients. Both sets of coefficients are published in the Web, at the APC website (file PER3_17x12E.dat) and at the UIUC website (Volume 1, APC chapter, Thin Electric section, 17 X 12). The latter site has even front and side pictures of the propeller and geometry data derived from them.
I measured the model's geometry (as well as weight and moments of inertia) and used the Plane Geometry spreadsheets by Blaine K. Beron-Rawdon to calculate several aerodynamic characteristics and eventually render the model in the REFLEX XTR² model flight simulator. The geometry and inertia data are available at my download page or directly here.
The simulator model is in a big installer package together with all my other Telemaster simulator models and my 50+ page document. The package is available at my Downloads page (in the "Telemaster for REFLEX" section) or directly here (15 MB). The package includes a demonstration flight, which can be watched in the REFLEX simulator or as a video at YouTube. The 50+ page document about the simulator models, including the chapter on Telemaster history, is also separately available in the Telemaster section of the Downloads page or directly here (PDF 6.2 MB).
Just for the record: The photos for the review chapter above have been shot on November 8th 2014 at about 2pm and at 48° 22' northern latitude, hence the low sun and the long shadows. Location was my roof deck, hence the unusual surroundings (at least for model airplane pictures).
 And as well for the record: This is the niche in my basement where
my models are stored. The Senior Telemaster is huge by my standards.
The 44" wing halves (bottom) just fit in the niche, while even
the three-part wing of the 101" wingspan glider (top) is smaller.
And as well for the record: This is the niche in my basement where
my models are stored. The Senior Telemaster is huge by my standards.
The 44" wing halves (bottom) just fit in the niche, while even
the three-part wing of the 101" wingspan glider (top) is smaller.
 The fuselage had to go to the left wall because there is enough room
for its 65" length. I had left the stab halves on the fuselage
because that was actually no problem for me and avoided unclamping
and fastening the delicate elevator joiner and linkage too often.
The fuselage had to go to the left wall because there is enough room
for its 65" length. I had left the stab halves on the fuselage
because that was actually no problem for me and avoided unclamping
and fastening the delicate elevator joiner and linkage too often.
 After a retrofit (see above),
the stabilizer halves can be easily mounted and demounted. Now the
fuselage is stored upright without them so the vertical tail
is out of the way.
After a retrofit (see above),
the stabilizer halves can be easily mounted and demounted. Now the
fuselage is stored upright without them so the vertical tail
is out of the way.